发布时间:2022-02-11 阅读量:3729 来源: 我爱方案网 作者: 我爱方案网汇编
本周热门方案来自我爱方案网自营旗舰店和方案超市的A级方案,咨询与采购较多,各领域的方案都涉及到,购买物联网方案可到我爱方案网自营店和方案超市进行方案咨询,现买现用,可量产。询价以下方案可致电方案负责人,刘先生:15112251620
方案一:面向工业IOT应用的PLBUS 高速电力线通信模块(主)

开发平台 : Leaguer 力合微电子
应用场景 : 路灯照明,智能照明,工业物联
方案介绍:
面向工业IOT应用的PLBUS 高速小型电力线通信主节点模块LM3460DE-T01J-H01M基于力合微电子高性能PLBUS(高速)电力线通信专用芯片LME3460而优化设计,可方便的应用到网关、集中器等设备,提供基 于电力线通信的高速数据传输服务。主节点在多节点 PLBUS网络中支持从节点管理、路由管理服务等。 PLBUS是一套智能设备电力线通信(PLC)统一接口 规范。不其它通信方式相比,PLC具有无需布线、穿墙越壁、不受阻挡、不受屏蔽等特点,为物联网智能设备提供 了一种有效的数据通信和接入方式。
方案二:PLBUS 窄带电力线通信直流传输模块LHT980C-390Z-002

开发平台 : Leaguer 力合微电子
应用场景 : 智能家电控制,智能家居控制,电源控制
方案介绍:
PLBUS是新一代电力线传输总线技术,并符合中国低压窄带电力线通信国家标准GB/T31983.31.2017 《低压窄带电力线通信 第31部分:窄带正交频分复用电力线通信物理层》。PLBUS通过既有供电线实现数据通信,无需重新拉线。基于PLBUS专用芯片的小型化模块可方便的置入5G集中AAU及站内电源组,通过供电电缆在两者之间建立起数据通道,支持任何数据或命令交互,实现智能监测、调节、控制等功能。
方案三:面向消费IoT应用的PLBUS 高速电力线通信模块(主)

开发平台 : Leaguer 力合微电子
应用场景 : 智能家电控制、智能家居控制、电动汽车应用
方案介绍:
该小型PLBUS(高速)电力线通信主节点模块基于力合微电子高性能PLBUS(高速)电力线通信专用芯片而优化设计,可方便的应用到网关、集中器等设备,提供基于电力线通信的高速数据传输服务。主节点在多节点PLBUS网络中支持从节点管理、路由管理服务等。
PLBUS是一套智能设备电力线通信(PLC)统一接口规范。与其它通信方式相比,PLC具有无需布线、穿墙越璧、不受阻挡、不受屏蔽等特点,为物联网智能设备提供了一种有效的数据通信和接入方式。
方案四:PLBUS窄带载波电力线通信芯片LME2980

开发平台 : Leaguer 力合微电子
应用场景 : 智能家电/智能家居控制、智慧路灯、数据采集/综合能效管理、光伏发电监测和管理、通过电力线进行数据传输的其它物联网场景
方案介绍:
LME2980是一款高集成度、高性能电力线通信SoC芯片,内置用户可编程MCU。其电力线通信部分采用先进的、适合国内恶劣电网环境的过零传输OFDM数字通信技术(Z-OFDM),物理层符合国家窄带电力线通信标准物理层规范GB/T31983.31,并支持面向物联网应用的完整电力线通信协议PLBUS。
芯片实现了高性能电力线通信物理层、宽动态范围自动增益控制模拟收发前端、模拟及数字滤波器、协议处理器等。芯片内置MCU集成完整PLBUS PLC协议栈,并提供丰富的外设接口。“通过电线,即可通信”,免布线,穿墙越壁、无盲点、不需天线,不受金属屏蔽,广泛适用于智能家电/家居智能控制、智慧路灯、综合能效管理以及各种工业IoT应用等。
方案五:某著名品牌自动平衡车控制板及程序

开发平台 : STM 意法半导体,MATLAB
应用场景 : 选择平坦,空旷的场所。
方案介绍:
此电路板为原创二轮平衡车电路,输入电压为12V, DSTM32F103C8T6作为主控芯片,采用tfb6612fng作为驱动芯片,并采用hc06蓝牙模块 与nrf24/01模块双通信实现对二轮平衡车的控制。通过计算得出角度以确定小车姿态,再通过光电门传感器测出小车电机转速,以计算出车速,运用PID算法再根据传感器测得数据处理后对电机驱动进行PWM输出,调节合适的PID参数使小车能稳定直立起来。
车上面传感器模块和电池盒的安装具有对称性,使小车重心在电机上方,传感器安装比电机稍微高点,大概在重心处,这样有助于小车的平衡和稳定性。在算法上我们采用精简PID算法和卡尔曼滤波算法来控制电机,使系統更稳定可靠。

一提到物联网、嵌入式或硬件开发,很多人会立刻联想到复杂的技术框架、繁琐的编译环境、五花八门的开发板,以及网络上零散难懂的知识点——这些门槛常让初学者望而却步甚至放弃。因此教育开发板大多选择以Python 作为开发语言,可灵活运行于资源受限的单片机。因为Python已成为“全民编程语言”和 AI 开发的主流,最主要的是开发者写完脚本后,无需搭建复杂环境,可直接推送至开发板运行,极大降低了学习和开发门槛。
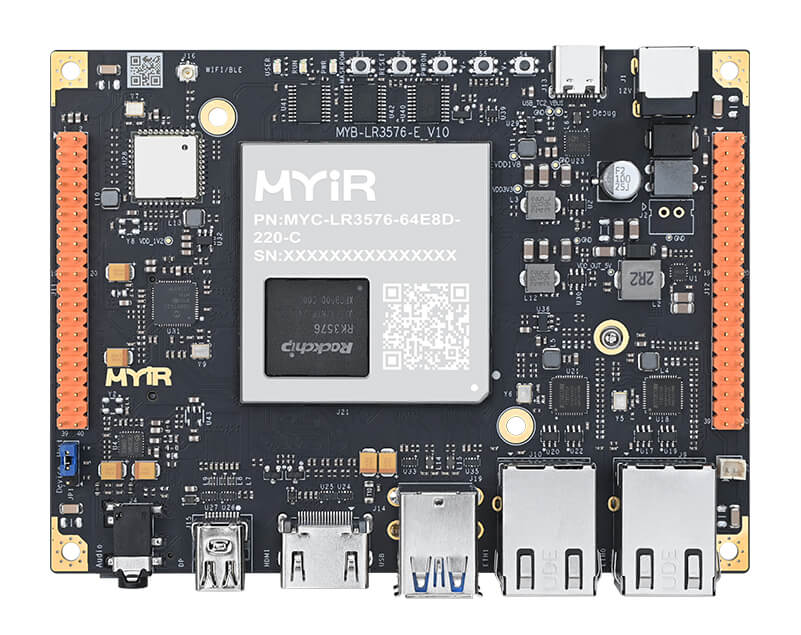
在科技飞速发展的浪潮中,人工智能与边缘计算不断深度融合,正以前所未有的力度与速度,重塑我们社会的运行方式与生活方式。RK3576芯片拥有4核Cortex-A72以及4核Cortex-A53提供基础算力,6TOPS算力NPU来模型推导运算。使用YOLOv8模型时也是手到擒来,接下来随着步伐看看它表现如何。
国产品牌中,裕太微是少数具备千兆车载PHY芯片产品的企业

我爱方案网推荐基于君正X2500、瑞芯微RV1126开发的人脸识别技术方案,内置独立NPU,提供高额高算力,让人脸识别更快更准确。其他大部分考勤/门禁/闸机设备方案,AI识别通常需约400毫秒;搭载RV1126方案,AI识别耗时仅约200毫秒,速度提升50%。

三相多功能电表作为现代电力计量与管理的核心设备,凭借其高精度测量、多参数集成和智能化分析能力,在工业、商业及公共设施领域展现出显著的技术优势。



