发布时间:2024-06-3 阅读量:998 来源: 综合自网络 发布人: wenwei
【导读】相对于其它电机,步进电机的最大区别是通过电脉冲信号转变为角位移或线位移来控制。步进电机可将其完整旋转分成多个不连续的步距运动,而施加脉冲的顺序是与电机轴旋转方向直接相关。可见,电机轴旋转的速度与输入脉冲的频率直接相关; 旋转长度与所施加的输入脉冲数直接相关。
如果设计上需要控制旋转的运动,步进电机是一个很好的解决方案。即使步进电机没有任何位置反馈,但步进电机仍然易于驱动并能够精确旋转。
大部分步进电机具有以下优点:
● 精确定位;
● 良好的转速控制;
● 与伺服电机相比,转速较低;
● 低成本和可用性。
大部分步进电机的局限性包括:
● 效率低;
● 高速旋转下,扭矩快速下降;
● 没有位置反馈;
● 如果控制不当,可能会出现共振
步进电机控制方法
步进电机的控制方法可以分为以下几种:
(1)单步控制法:通过单片机或计算机控制电机的每一步运动,可以实现较高的精度和定位控制。
(2)微步控制法:通过控制电机的微步运动,可以实现更高的分辨率和更平滑的运动,通常需要使用专门的微步驱动器。
(3)脉冲方向控制法:通过向电机提供方向脉冲和步进脉冲信号,可以实现电机的精确步进控制,通常使用步进驱动器或控制器实现。
(4)PWM控制法:通过改变电机驱动器中的PWM信号的占空比,可以控制电机的转速和转矩等性能参数。
总的来说,步进电机控制方法的选择需要根据具体应用场景和控制要求来确定。对于一些高精度和高性能的应用,可以考虑采用微步控制法;而对于一些简单的定位和控制任务,可以使用单步控制法或脉冲方向控制法。

佰维存储2025年上半年实现营业收入3,912,336,913.69元,同比增长13.7%。但受行业周期等因素影响,公司报告期内归属于上市公司股东的净亏损为225,795,502.52元,同比由盈转亏;扣除非经常性损益后的净亏损为231,666,270.28元,同样出现同比下滑。业绩压力主要源于行业价格波动及公司战略性投入增加。

2025年上半年,工业富联(股票代码:601138.SH)实现营业收入3607.6亿元,同比大幅增长35.58%;归属于上市公司股东的净利润达121.13亿元,同比增长38.61%;扣非净利润116.68亿元,同比增长36.73%,核心财务指标均创历史新高。报告期内,公司总资产规模增至3831.28亿元,同比增长20.66%,展现出强劲的资产扩张能力。
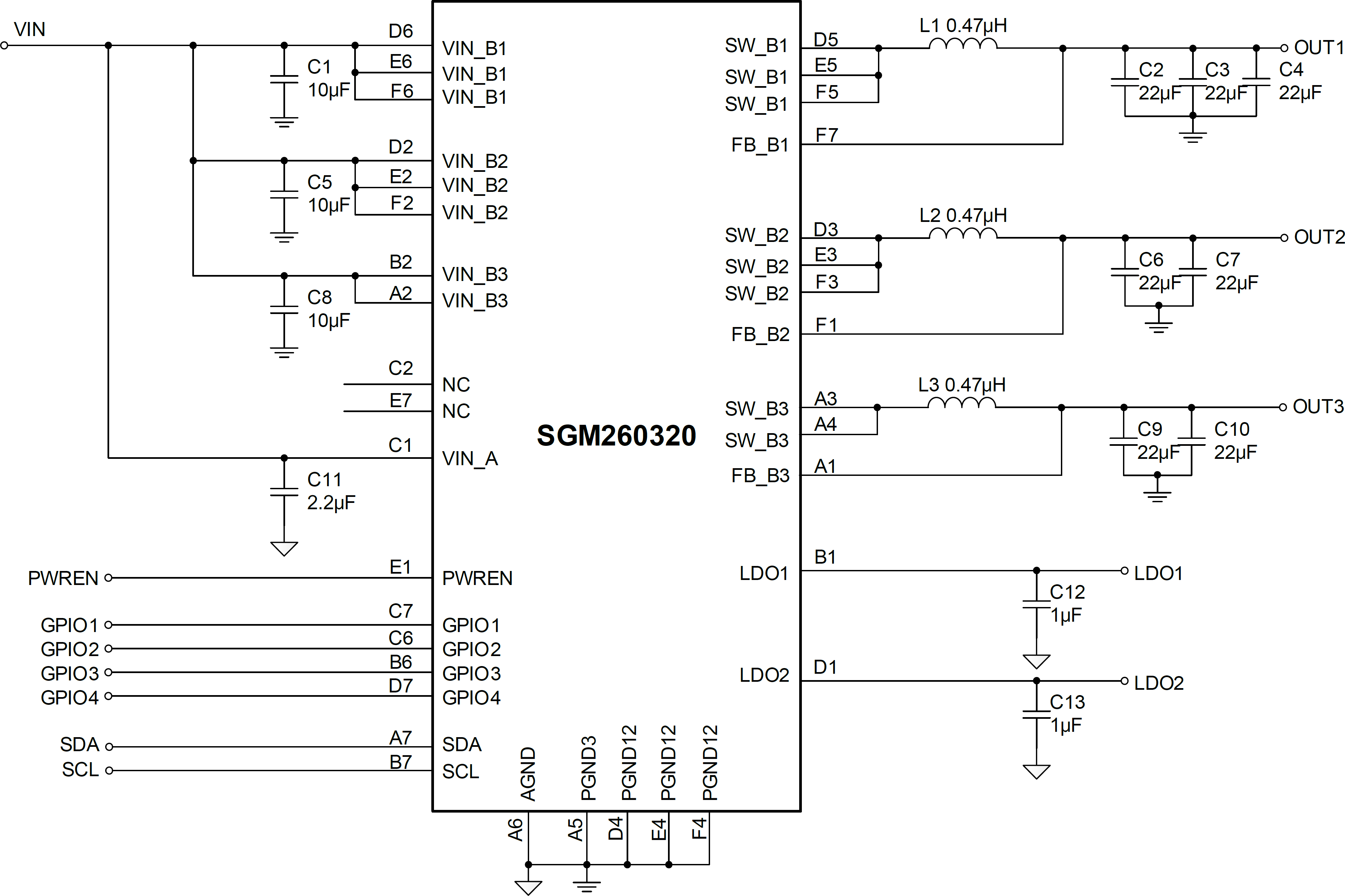
在追求电子设备小型化、高性能和超低功耗的时代,复杂的多轨电源设计已成为研发的关键挑战。传统分立式电源方案不仅占用宝贵的PCB面积,也增加了设计难度与系统功耗控制的复杂性。固态硬盘(SSD)、现场可编程门阵列(FPGA)、微控制器单元(MCU)系统及便携设备对电源管理集成电路(PMIC)的要求日益严苛:高效转换、低待机功耗、高集成度、精确调压以及智能化管理缺一不可。圣邦微电子(SG Micro)推出的SGM260320 PMIC,正是瞄准这一市场需求,以高度集成、卓越性能和丰富的可配置功能,提供了一站式的高效供电解决方案。

随着智能手机影像功能逐渐成为用户核心需求,光学防抖(OIS)技术正面临前所未有的性能挑战。TDK株式会社凭借旗下InvenSense公司15年OIS/EIS技术积累,最新推出的SmartMotion® ICM-536xx系列六轴IMU,正在打破高端防抖技术的成本壁垒。该方案通过突破性的6.4kHz输出数据速率和20位分辨率,首次将专业级防抖性能引入主流移动设备市场。

2024年,全球工业机器人市场经历了一次明显的周期性调整。国际机器人联合会(IFR)的初步统计数据显示,全年新装机量约为52.3万台,较上年下滑约3%。这是近年来该市场罕见出现的负增长,反映出多重经济与技术周期叠加下的复杂局面。



