发布时间:2023-06-10 阅读量:72776 来源: 我爱方案网 作者:
专栏总目录
CAN (controller Area Network)
CAN BUS:控制器局域网络总线
目前世界上绝大多数汽车制造厂商都采用CAN总线来实现汽车内部控制系统之间的数据通信。
RK3568/RK3588的CAN驱动文件:drivers/net/can/rockchip/rockchip_canfd.c
rockchip_linux_defconfig配置:
CONFIG_CAN=yCONFIG_CAN_DEV=yCONFIG_CAN_ROCKCHIP=yCONFIG_CANFD_ROCKCHIP=y
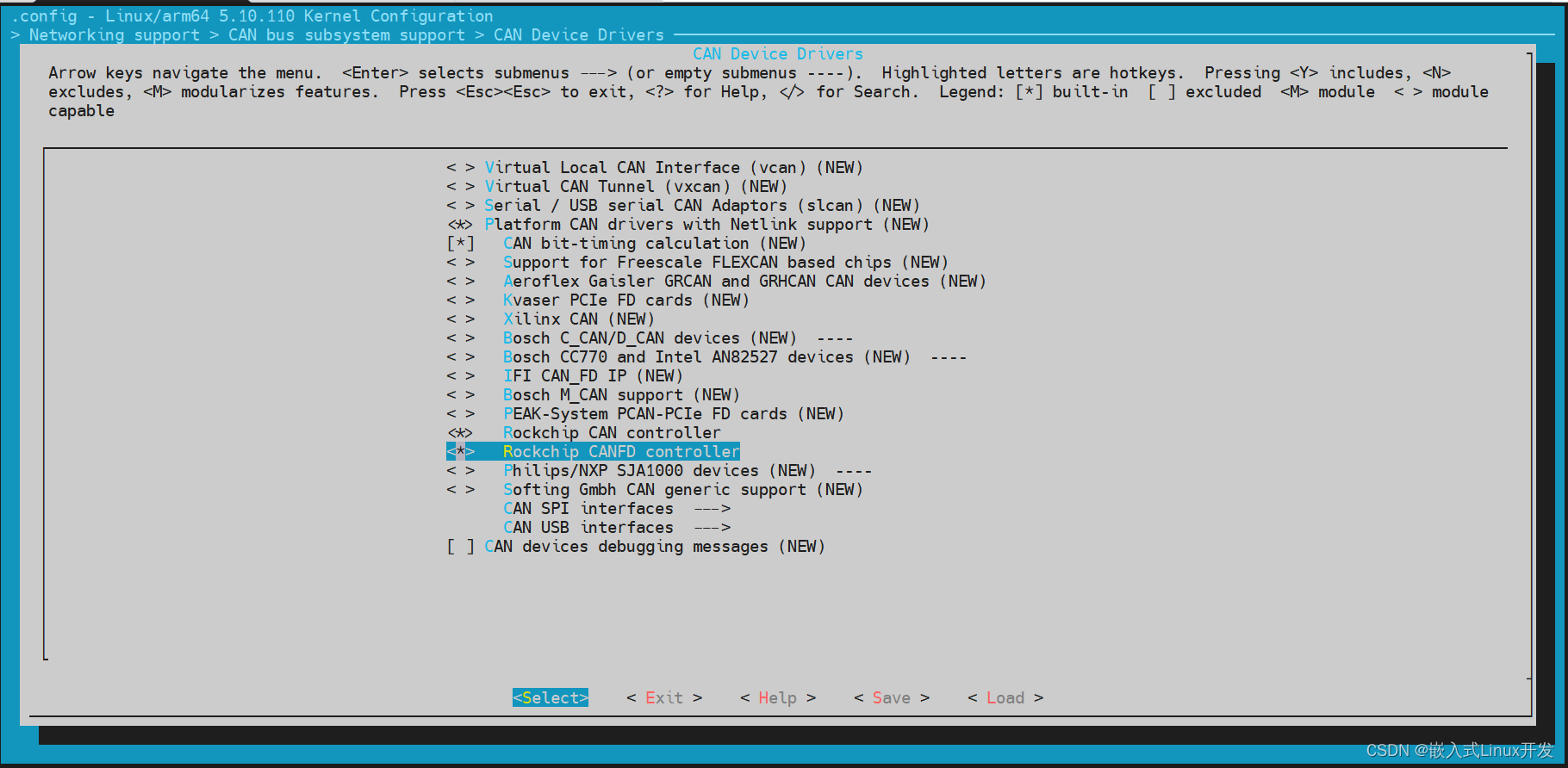
内核配置:
cd kernelmake ARCH=arm64 menuconfigmake savedefconfig
选择:Networking support —> CAN bus subsystem support ()—>CAN Device Drivers() —> Platform CAN drivers with Netlink support(*)
interrupts =
转换完成,产生中断信号。
clock
时钟属性,用于驱动开关clk,reset属性,用于每次复位总线。
pinctrl
can1: can@fea60000 {
compatible = "rockchip,can-2.0";
reg =<0x0 0xfea60000="" 0x0="" 0x1000="">;
interrupts =
clocks = <&cru clk_can1="">, <&cru pclk_can1="">;
clock-names = "baudclk", "apb_pclk";
resets = <&cru srst_can1="">, <&cru srst_p_can1="">;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = <&can1m0_pins>;
tx-fifo-depth =<1>;
rx-fifo-depth =<6>;
status = "disabled";
};
compatible = “rockchip,can-1.0” ,rockchip,can-1.0用来匹配can控制器驱动。
compatible = “rockchip,can-2.0” ,rockchip,can-2.0用来匹配canfd控制器驱动。
assigned-clock-rates用来配置can的始终频率,如果CAN的比特率低于等于3M建议修改CAN时钟到100M,信号更稳定。高于3M比特率的,时钟设置200M就可以。
pinctrl配置:根据实际板卡连接情况配置can_h和can_l的iomux作为can功能使用。
/* can1 */ &can1 {
status = "okay";
assigned-clocks = <&cru clk_can1="">;
assigned-clock-rates =<200000000>;
pinctrl-names = "default";
pinctrl-0 = <&can1m1_pins>; //根据原理图配置 };
由于系统根据上述dts节点创建的CAN设备只有一个,而第一个创建的设备为CAN0
查询当前⽹络设备:
ifconfig -a
CAN启动
ip link set can0 down //关闭CAN
ip link set can0 type can bitrate 500000 //设置⽐特率500KHz
ip -details -statistics link show can0 //打印can0信息
ip link set can0 up //启动CAN
CAN发送
cansend can0 123#DEADBEEF //发送(标准帧,数据帧,ID:123,date:DEADBEEF)
cansend can0 123#R //发送(标准帧,远程帧,ID:123)
cansend can0 00000123#12345678 //发送(扩展帧,数据帧,ID:00000123,date:DEADBEEF)
cansend can0 00000123#R //发送(扩展帧,远程帧,ID:00000123)
CAN接收
candump can0 //candump can0
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
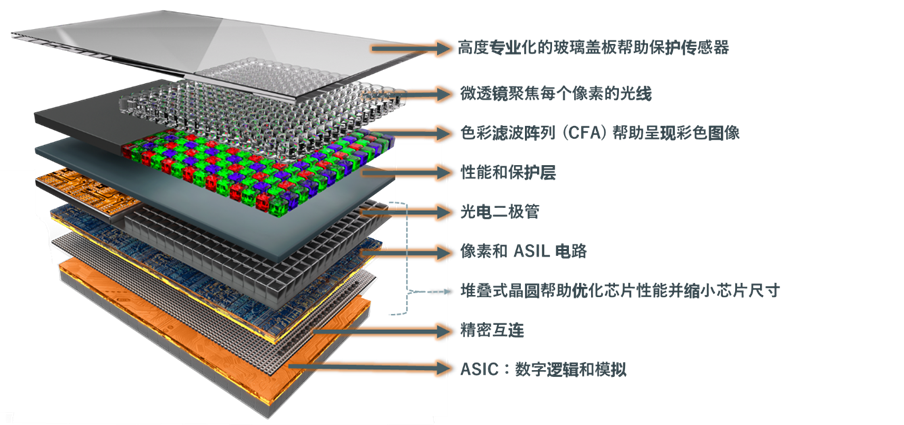
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。
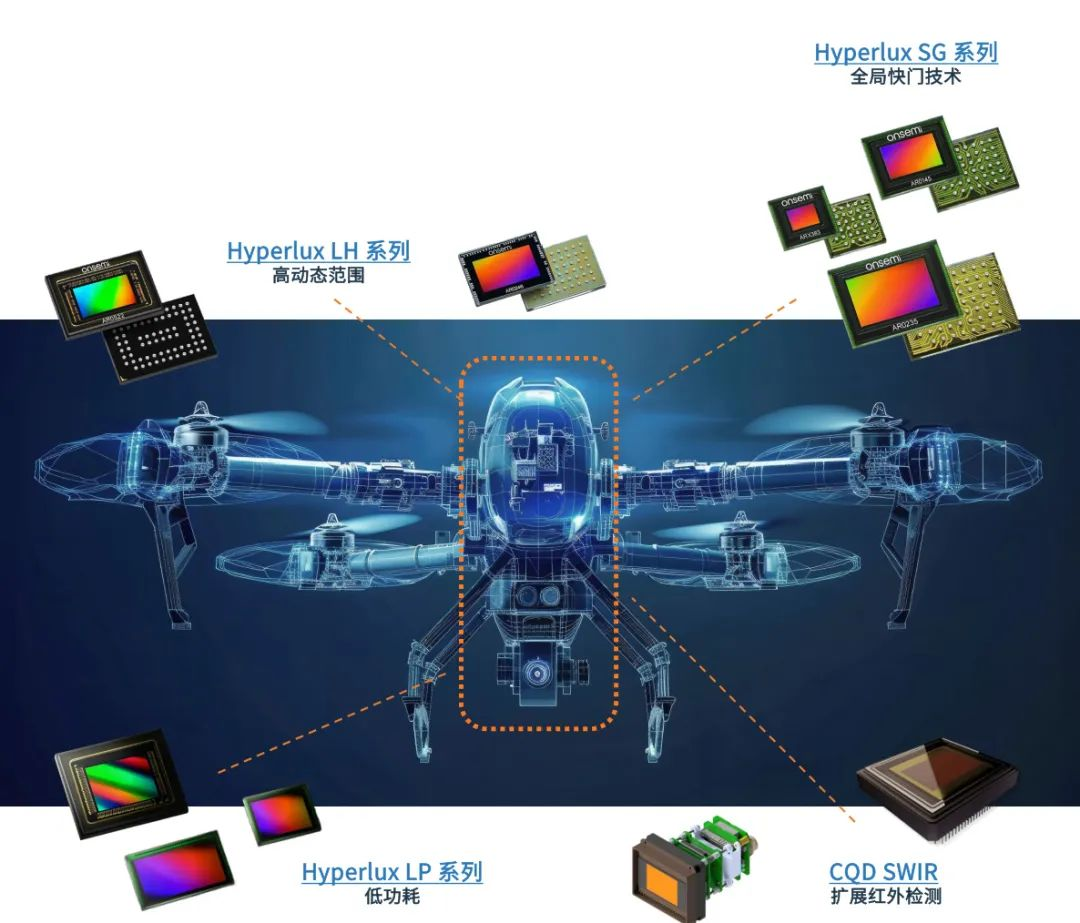
无人机已不再是简单的飞行器,而是集成了尖端感知与决策能力的空中智能载体。其核心系统——特别是自主导航与感知技术——是实现其在测绘、巡检、农业、物流、安防等多个领域高效、精准作业的关键。本文将深入剖析无人机如何通过这些核心技术“看见”、“思考”并“规划”路径,实现真正意义上的自主飞行能力。



