发布时间:2022-02-25 阅读量:11167 来源: PI 发布人: Cole
作者:Roland Saint Pierre
Power Integrations新产品定义总监
离线反激式电源在变压器初级侧需要有钳位电路(有时称为缓冲器),以在正常工作期间功率MOSFET开关关断时限制其两端的漏源极电压应力。设计钳位电路时可以采用不同的方法。低成本的无源网络可以有效地实现电压钳位,但在每个开关周期必须耗散钳位能量,这会降低效率。一种改进的方法就是对钳位和功率开关采用互补驱动的有源钳位技术,使得能效得以提高,但它们会对电源的工作模式带来限制(例如,无法工作于CCM工作模式)。为了克服互补有源钳位电路所带来的设计限制,可以采用另外一种更先进的控制技术,即非互补有源钳位。该技术可确保以更具成本效益的方式使用钳位能量。
本文将简要介绍反激式电源中对初级钳位电路的需求。然后比较和对比无源钳位方案、互补有源钳位方案以及非互补有源钳位方案的使用,最后介绍一款支持非互补钳位方案且可实现超高功率密度反激电源设计的芯片组。
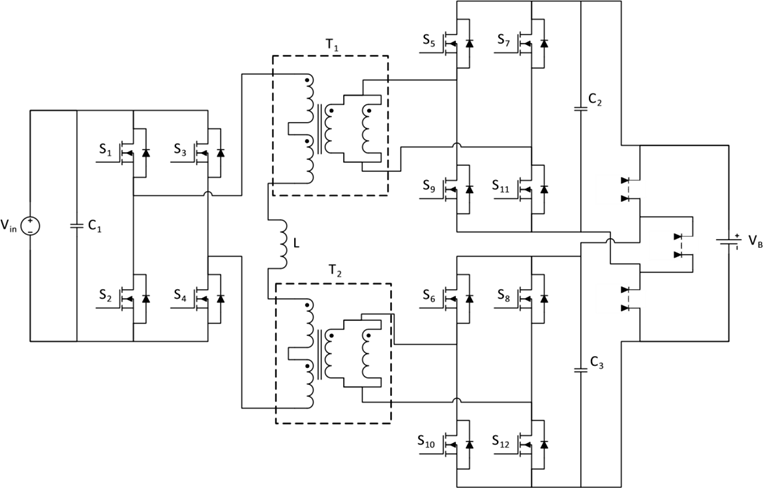
在反激式变换器中,当初级侧开关关断时,电压(VOR)由次级侧反射至初级侧,存储的能量通过变压器传输到负载(图1)。VOR经变压器圈数比加以放大,叠加在VDC输入母线电压后会增大开关器件两端的电压应力。在传统电路中,会使用无源初级钳位电路来对这个电压加以限制。

图1:无源初级钳位RCD解决方案(高亮显示部分)需要耗散大量的热量,限制了反激式电源的效率和工作频率
除了电压应力(VIN+VOR)外,在初级开关管关断时还会产生很大的电压过冲,这是由初级绕组漏感中存储的能量造成的。钳位电路可对由此三个方面因素构成的电压过冲进行限制以保护初级开关(图2)。此外,在这种电路配置下,功率开关在漏极电压较高时开通。开关损耗与VDS2成正比,因此高VDS会增加开关的开通损耗,从而进一步降低效率。

图2:开通损耗和钳位损耗都与开关频率有关。
钳位电容吸收漏感能量,但该能量随后被钳位电阻所消耗。在每个开关周期中都会有能量损失,这样在现实当中就限制了开关频率的提高。而较低的开关频率,则需要使用更大的变压器。因此,使用无源钳位会增加损耗并不得不使用较低的开关频率,这两种情况都会增大电源尺寸。而使用有源钳位则可以突破这些限制。
互补有源钳位
有源钳位用一个开关代替RCD钳位中的电阻,这个开关通常是一个功率MOSFET(图3)。它不是用来耗散漏感能量,而是可以将漏感能量回传至变压器。在互补有源钳位中,当主MOSFET关断时,钳位开关开通,两者之间具有一小段死区时间。此时钳位电容被充电。而在下一次主MOSFET开通之前,钳位开关关断,钳位电容中的能量得以再循环至输出端。这种有源钳位被称为互补驱动方案,因为主MOSFET和有源钳位开关以互补方式工作。

图3:典型[互补]有源钳位方案的简化原理图
零电压开关可以使用复杂的自适应控制技术来实现,以实现漏感和钳位电容之间的谐振。当钳位开关关断时,漏感与钳位电容谐振产生的负向电流,在功率MOSFET开通之前对其COSS两端的电压进行放电,从而实现零电压开关。对于输出电容比较高的设计,将会导致谐振效果变差(输出电容会经过变压器反射至初级,进而增加钳位电容的容量)。通常变压器当中将会没有足够的漏感储能来适应这种钳位容量的变化。为了克服这个问题,电源输出端往往需要使用两级LC滤波器来确保低的初级反射电容,同时还要满足输出纹波要求。这种互补有源钳位方案是对无源钳位的改进,但仍存在以下限制:
1.需要在轻载下使用脉冲串模式,这会导致更高的输出纹波
2.两级输出滤波器
3.仅限于临界导通模式或非连续导通模式(CrM和DCM);没有CCM工作模式,使输出电压范围宽的USBPD设计难以实现
使用非互补有源钳位提高性能
采用非互补控制方案,不是在主MOSFET关断后的一小段时间后立即开通钳位开关,而是在主MOSFET开通之前短暂开通钳位开关。非互补控制能够在连续导通模式以及非连续导通模式(和CrM)下操作,并且仍可实现零电压开关。这使得设计出的电源具有非常宽的输入电压范围和较宽的输出电压范围,后者是设计高效USBPD充电器所需要的。对于传统的控制方案,非互补钳位开关的驱动信号与初级开关以及同步整流开关的同步设计面临着挑战。而采用单个控制器来管理所有三个器件的开关操作,可大大简化电路并确保可靠操作。

图4:对于非互补模式开关,有源钳位开关仅在主开关开通之前开关一次
非互补有源钳位控制可以使用Power Integrations的Innoswitch4-CZ/ClampZero?芯片组加以实现(图5)。InnoSwitch4-CZ器件采用InSOP-24D封装,内部集成了可靠耐用的PowiGaN?750V开关以及用于控制主开关、钳位开关和同步MOSFET操作的次级控制器,同时内部含有满足安全标准的FluxLink控制链路。InnoSwitch4-CZIC包括两个专门用于ClampZero有源钳位非互补控制的引脚:用于开通和关断ClampZero开关的上管驱动(HSD)引脚,以及用于测量直流母线电压的V引脚。

图5:InnoSwitch4-CZ的HSD信号用于控制ClampZero有源钳位的开关,V引脚用于检测高输入电压条件,进而使能非连续工作模式
次级侧控制器发出指令,启动HSD信号,将ClampZero PowiGaN开关开通,以便在初级PowiGaN开关换向前使漏感和钳位电容产生谐振。ClampZero器件的关闭和主开关的开通之间存在非常小的延迟,可以利用HSD引脚上的小电阻从外部进行调整,以帮助优化时序。
在连续导通模式下,HSD信号在漏感与钳位电容谐振周期的四分之一时间内保持开通。在很宽的工作范围内使用这种谐振模式所面临的一个挑战是,漏感通常是一个非常小的数值,在高压输入条件下主开关管两端的电压较高,这就需要更多的能量实现零电压开关。因而漏感的储能往往不够。这也是为何此时非连续导通控制模式需要介入的原因。
对于非连续导通模式(高输入电压工作),HSD信号脉冲宽度变为励磁电感(加上漏感,尽管漏感与励磁电感相比分量通常非常小)和钳位电容产生谐振的谐振周期的四分之一时间。V引脚的输入电压信息用于控制非连续导通模式的启动。当检测到高输入电压条件时,ClampZero关断驱动信号和主开关开通驱动信号之间的延迟也会增加。这为励磁电感(加上漏感)与钳位电容之间的谐振提供了更多时间,以降低主功率开关上的电压。这种工作模式不需要互补有源钳位电路所需的脉冲串工作模式,避免了互补模式控制带来的更高输出纹波和音频噪声的风险。
总结
离线反激式电源需要使用初级侧钳位电路来保护功率MOSFET。使用无源RCD钳位成本低,但性能较低。使用具有互补控制方案的有源钳位可以提高性能,但仍然存在局限性。InnoSwitch4-CZIC产品系列可提供独特的控制架构,进而实现更复杂的非互补有源钳位控制,采用此方案可设计出具有非常宽的输入电压范围和较大的输出电压设定点变化的高效、超紧凑USB PD充电器。Power Integrations的InnoSwitch4-CZ/ClampZero芯片组可用于简化采用非互补控制的有源钳位方案,并加快上市时间。
碳化硅(SiC)功率器件正以颠覆性优势引领工业充电器变革——其超快开关速度与超低损耗特性,驱动功率密度实现跨越式提升,同时解锁了传统IGBT无法企及的新型拓扑架构。面对工业应用对高效隔离式DC-DC转换的严苛需求,本文将深入解析从600W至深入解析从600W至30kW全功率段的拓扑选型策略,揭示SiC技术如何成为高功率密度设计的核心引擎。
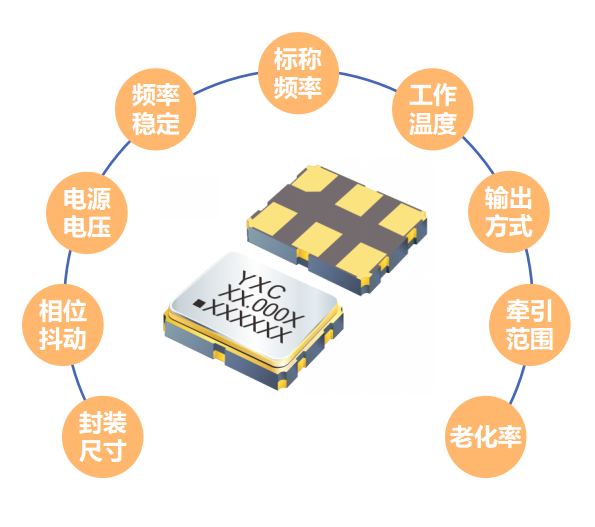
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
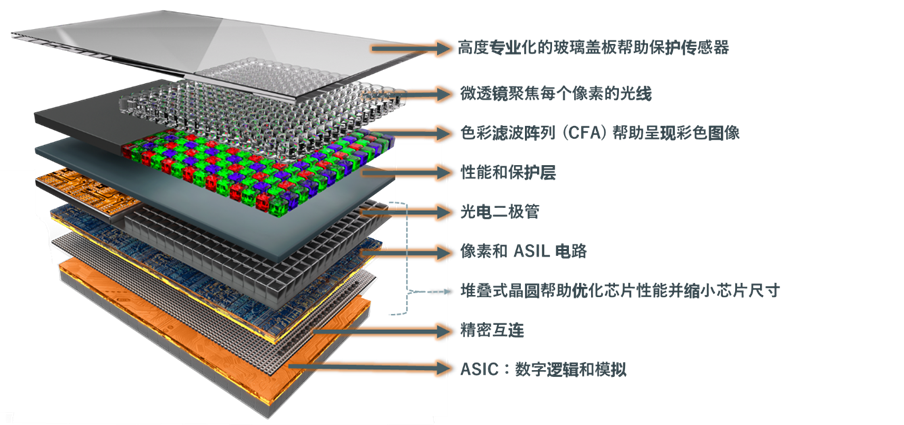
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。



