发布时间:2021-11-30 阅读量:1237 来源: 发布人: lina
车辆中电子电路数量不断增加,使得需要消耗的电池电量也随之大幅增长。为了支持遥控免钥进入和安全等功能,即使在汽车停车或熄火时,电池也要持续供电。
由于所有车辆都使用有限的电池供电,因此必须找到一种方法,一方面能增加更多功能(尤其是在设计汽车前端电源系统时),同时又不会显著增加耗电量。是否需要符合严格的电磁兼容性 (EMC) 标准(例如,国际标准化组织的 ISO7637 和德国汽车制造商制定的LV 124标准),直接影响前端电池反向保护系统的整体设计。一些原始设备制造商将车辆处于停车状态时的总电流消耗规定为:在 12V 电池供电系统中每个电子控制单元 (ECU) 低于100µA,在 24V 电池供电系统中低于500µA。
在本文中,我将介绍设计低静态电流 (IQ) 汽车电池反向保护系统的三种方法。
使用 T15 作为点火或唤醒信号
设计低 IQ 电池反向保护系统的第一种方法是使用T15 作为点火或唤醒信号。T15 是一个接线端子,当车辆点火开关关闭时,它会与电池断开连接。使用 T15 作为外部唤醒信号是一种在睡眠或活动模式下运行 ECU 的传统方法。图 1 为一个示例。
 汽车电池反向保护系统的 3 种方法")
图 1:使用 T15 作为唤醒信号的汽车 ECU 中的电池反向保护
当点火开关打开时,T15 会连接到电池电压 (VBATT) 电位,从而使理想二极管的使能引脚处于逻辑高电平。处于有源模式下的理想二极管控制器,在启用电荷泵、控制和场效应晶体管 (FET) 驱动器电路的同时,主动控制外部 FET 以实现理想二极管运行。当车辆停车时,T15 降至 0V,理想二极管控制器利用关断状态做出响应,这会导致电荷泵和控制块关闭,从而使 IQ 消耗低于3µA。在这种工作模式下,外部 FET 关闭,FET 的体二极管形成正向传导路径,为负载供电。该方案需要额外向 ECU 接线。
使用系统的 MCU 和 CAN 唤醒信号
第二种方法是使用系统的微控制器 (MCU) 和控制器局域网 (CAN) 唤醒。在很多情况下,系统的通信通道使低 IQ 关断模式成为可能。图 2 为使用这种方法的示例系统设计。
 汽车电池反向保护系统的 3 种方法")
图 2:使用 MCU 和 CAN 唤醒信号实现使能控制的低 IQ 电池反向保护
车辆中的 CAN 收发器将消息从通信总线转换到各自的控制器(通常是 MCU)。收发器可以通过发出进入待机模式直到被唤醒的命令,来指示何时不需要相关功能。此时中继消息指示控制器会传递将系统置于低功耗状态的指令,其实现方式是使理想二极管控制器的使能信号处于逻辑低电平。借助更先进的收发器和系统基础芯片,一个器件可以处理此过程的多种功能,并过渡到低功耗状态或进行唤醒。
该方案需要来自 MCU 的内部控制信号(通过 CAN 控制)。
使用常开理想二极管控制器
第三种方法是使用常开理想二极管控制器。大家可以想象一下这个不需要控制信号即可进入低功耗状态的系统设计。在这种设计中,无需额外进行接线也无需依赖系统软件,即可使理想二极管控制器始终处于启用状态,即使在睡眠模式下也是如此。这种类型的系统设计可以使用低 IQ 理想二极管控制器来实现,例如 LM74720-Q1、LM74721-Q1 或 LM74722-Q1,如图 3 所示。这些器件集成了所有必要的控制块,用于符合 EMC 标准的电池反向保护设计,并集成了用于驱动高侧外部 MOSFET 的升压稳压器,从而使正常运行期间的 IQ 为27µA。如需了解更多信息,请参阅应用手册“理想二极管基础知识”。
 汽车电池反向保护系统的 3 种方法")
图 3:使用不带外部使能控制的常开低 IQ 理想二极管控制器实现电池反向保护
这些理想二极管控制器支持具有有源整流的电池反向保护,以及采用背对背 FET 拓扑的负载断开 FET 控制,以在系统故障(例如过压事件)期间保护下游,如图 4 所示。
 汽车电池反向保护系统的 3 种方法")
图 4:使用 LM74720-Q1 的 24V 汽车 ECU 中的电池反向保护
借助可调节过压保护功能,您可以使用 50V 额定下游滤波电容器(而非 80V 至 100V 额定电容器)和 40V 额定直流/直流转换器(而非 65V 额定转换器)进行基于 24V 汽车电池输入的系统设计。
LM74720-Q1 和 LM74721-Q1 提供0.45µs反向电流的快速响应比较器和1.9µs正向电流的快速响应比较器,以及强大的 30mA 升压稳压器,以在高达 100kHz 频率的汽车交流叠加测试中支持和实现灵活而高效的有源整流。LM74722-Q1 的整流速度比 LM74720-Q1 和 LM74721-Q1 器件快两倍,正向比较器响应电流为 0.8µs,可实现高达 200KHz 的有源整流频率。LM74721-Q1 具有集成漏源电压 (VDS) 钳位,可实现无瞬态电压抑制器 (TVS) 的电池反向保护设计,从而使系统解决方案更加紧凑。如需详细了解有源整流,请阅读我们的应用报告“有源整流及其在汽车 ECU 设计中的优势”。
结语
借助 LM74720-Q1、LM74721-Q1 和 LM74722-Q1 低 IQ 常开理想二极管控制器,您能够设计汽车电池反向保护系统,而无需外部使能控制。这些理想二极管控制器具有低 IQ、背对背 FET 驱动能力和过压保护特性,因此在设计中可以使用具有较低额定电压的电容器等下游组件,并且可以为空间受限的 ECU 减小印刷电路板的尺寸。
(来源:德州仪器)
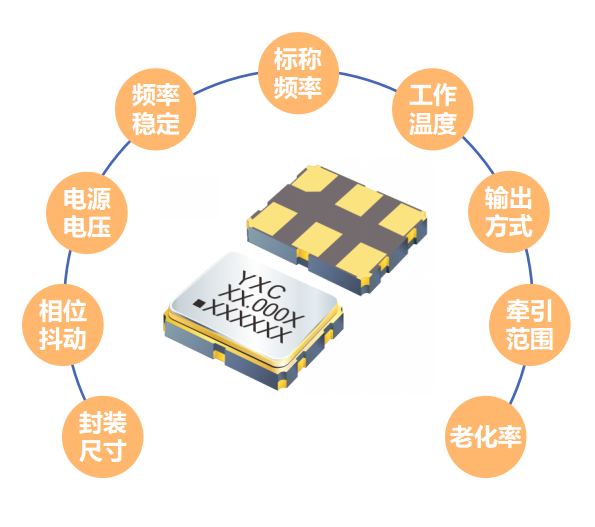
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
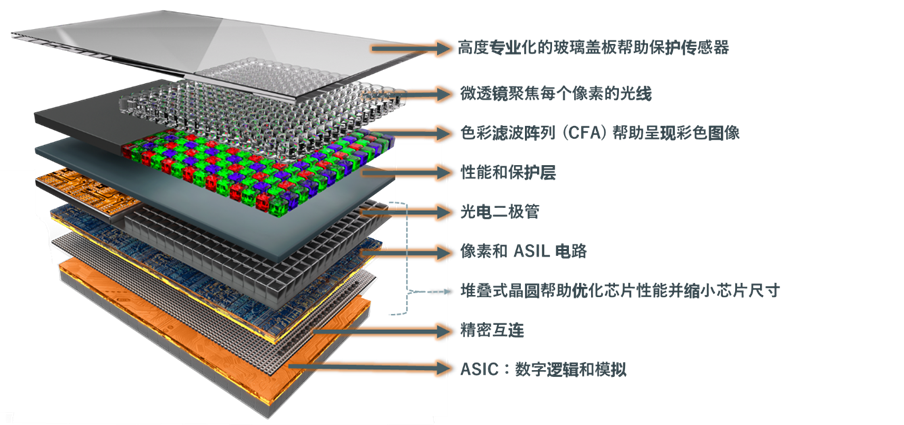
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。
无人机已不再是简单的飞行器,而是集成了尖端感知与决策能力的空中智能载体。其核心系统——特别是自主导航与感知技术——是实现其在测绘、巡检、农业、物流、安防等多个领域高效、精准作业的关键。本文将深入剖析无人机如何通过这些核心技术“看见”、“思考”并“规划”路径,实现真正意义上的自主飞行能力。



