发布时间:2021-11-26 阅读量:1470 来源: ADI 发布人: wenwei
【导读】输出级的作用是提供功率增益。它应该具有高输入阻抗和低输出阻抗。该级的一个显而易见的选择就是发射极跟随器。但是,为了同时提供拉电流和灌电流能力,需要两个互补跟随器:一个NPN型用于拉电流,一个PNP型用于灌电流。结果就是所谓推挽配置,图1显示了一个简单例子。R1和R2用于检测Q1和Q2的集电极电流,以及在输出过载的情况下限制这些电流。
本次实验旨在研究简单推挽放大器的输出级(B类和AB类)。
背景信息
输出级的作用是提供功率增益。它应该具有高输入阻抗和低输出阻抗。该级的一个显而易见的选择就是发射极跟随器。但是,为了同时提供拉电流和灌电流能力,需要两个互补跟随器:一个NPN型用于拉电流,一个PNP型用于灌电流。结果就是所谓推挽配置,图1显示了一个简单例子。R1和R2用于检测Q1和Q2的集电极电流,以及在输出过载的情况下限制这些电流。
材料
● ADALM2000 主动学习模块
● 无焊面包板
● 跳线
● 两个100 Ω电阻
● 一个2.2 kΩ电阻
● 两个10 kΩ电阻
● 两个小信号NPN晶体管(最好是具有匹配VBE的SSM2212)
● 两个小信号PNP晶体管(最好是具有匹配VBE的SSM2220)
说明
开始之前,请确保关闭ADALM2000上的电源。电路和实验室硬件的连接如图1所示。示波器输入1应连接到Q1和Q2基极的接合处。示波器输入2应连接到Q1和Q2发射极的接合处。

图1.推挽输出级
硬件设置
示波器的通道1应连接为显示第一发生器的输出,两个通道(1和2)均应设置为以每格1 V显示输出。面包板连接如图2所示。
程序步骤
波形发生器W1配置为1 kHz正弦波,峰峰值幅度约为6 V,偏移为0。将正电源(Vp)设置为+5 V,将负电源(Vn)设置为-5 V。使用示波器通道1观察W1的输入,使用示波器通道2观察放大器在RL处的输出。图3为Scopy波形图示例。

图2.推挽输出级面包板电路

图3.推挽输出级波形
接下来施加电源并调整波形发生器,使W1为100 Hz三角波,其偏移为0 V,峰峰值幅度为3 V。在x-y模式下使用示波器观察电路的电压传输曲线。图4为Scopy XY波形图示例。

图4.电压传输曲线
减少输出失真
在图1所示的基本推挽级中,过零处的大量失真是死区——此时NPN和PNP发射极跟随器均关闭——造成的结果。如果用两个VBE压降预偏置BJT,则波形在过零处的死区大幅减少,如图5所示。这里,预偏置功能由二极管连接的NPN Q1和PNP Q3提供。电阻R1和R2提供偏置电流,并设置流入输出器件Q2和Q4中的空闲电流。
说明
在电源关闭的情况下,组装图5所示电路,引线应尽可能短且整洁。NPN晶体管Q1和Q2以及PNP晶体管Q3和Q4应从VBE匹配最佳的可用器件中选择。在同一封装中制造的晶体管,例如SSM2212或CA3046,往往比单个器件匹配得更好。

图5.具有过零失真消除功能的推挽输出级
考察图5中由Q1、Q2、Q3和Q4的基极发射极电压形成的环路,我们知道环路周围的压降之和必须为零。因此,如果Q1与Q2相同,并且Q3与Q4相同,则仅当Q1中的电流与Q2中的电流相同,并且Q3中的电流与Q4中的电流相同时,环路周围的电压才会为零。当输出为0 V——也就是说RL中没有电流,输入也必然为0 V。
硬件设置
示波器的通道1应连接第一路信号发生器的输出,两个通道(1和2)均应设置为以每格1 V显示输出。面包板连接如图6所示。

图6.具有过零失真消除功能的推挽输出级面包板电路
程序步骤
波形发生器W1配置为1 kHz正弦波,峰峰值幅度约为6.0 V,偏移为0。使用示波器通道1观察W1的输入,使用示波器通道2观察放大器在RL处的输出。

图7.具有过零失真消除功能的推挽输出级波形
另一种配置
记住由Q1、Q2、Q3和Q4的基极发射极电压形成的环路,我们还知道环路周围压降的顺序可以互换。因此,如果互换NPN Q1和PNP Q3的VBE值,我们将得到图8所示的配置。有些人可能意识到,Q3和Q2的组合就是我们在4月份文章"ADALM2000实验:发射极追随器(BJT)"中讨论的低失调跟随器。电路利用PNP发射极跟随器的VBE向上偏移来部分抵消NPN发射极跟随器的VBE向下偏移。晶体管Q1和Q4分别与Q3和Q2互补。

图8.发射极跟随器过零失真消除
硬件设置
示波器的通道1应连接第一路信号发生器的输出,两个示波器通道(1和2)均应设置为以每格1 V显示输出。面包板连接如图9所示。
程序步骤
波形发生器W1配置为1 kHz正弦波,峰峰值幅度约为6 V,偏移为0。使用示波器通道1观察W1的输入,使用示波器通道2观察放大器在RL处的输出。

图9.发射极跟随器过零失真消除面包板电路

图10.发射极跟随器过零失真消除波形
问题:
对于图5中的电路(具有过零失真消除功能的推挽输出级)和图8中的电路(发射极跟随器过零失真消除),仿真并绘制输入/输出传输曲线。这些电路与图1中的电路相比如何?
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理。
推荐阅读:
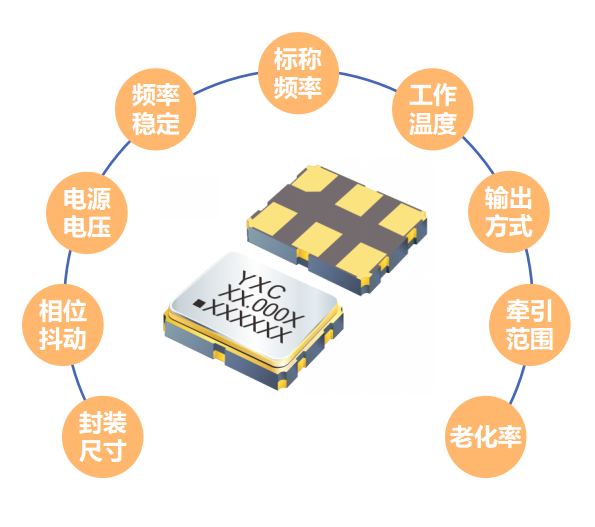
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
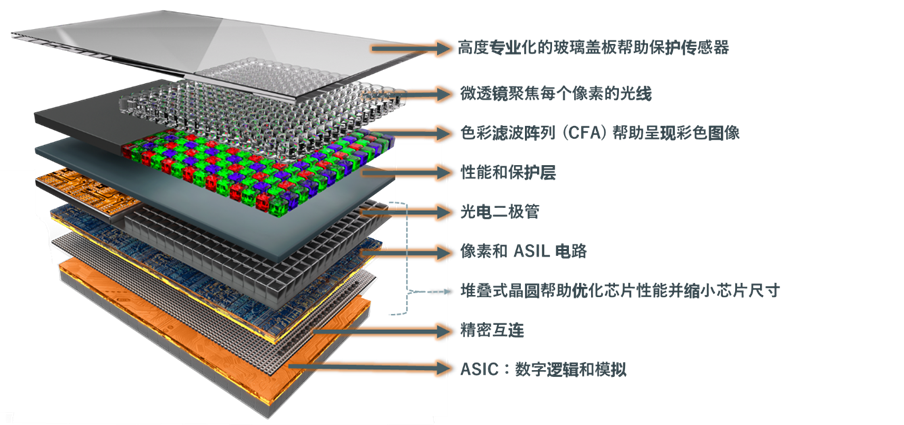
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。
无人机已不再是简单的飞行器,而是集成了尖端感知与决策能力的空中智能载体。其核心系统——特别是自主导航与感知技术——是实现其在测绘、巡检、农业、物流、安防等多个领域高效、精准作业的关键。本文将深入剖析无人机如何通过这些核心技术“看见”、“思考”并“规划”路径,实现真正意义上的自主飞行能力。



