发布时间:2021-11-25 阅读量:1069 来源: 发布人: lina
Q: 我们能够增加固定增益差分放大器的增益吗?
A: 可以,通过增加更多的电阻。
经典的四电阻差分放大器可以解决许多测量难题。但是,总有一些应用需要的灵活性比这些放大器所能提供的更高。由于在差分放大器中电阻匹配直接影响到增益误差和共模抑制比(CMRR),所以将这些电阻集成到同一个裸片上可以实现高性能。但是,仅仅依靠内部电阻来设置增益,用户就无法在制造商的设计选择之外灵活选择自己想要的增益。

在信号链中使用固定增益放大器时,如果需要更多的增益,通常会添加另一个放大器级来实现所需的总增益。虽然这种方法非常有效,但它会增加整体的复杂性、所需的板空间、噪音、成本等。或者,您可以选择另一种方法,在不增加第二个增益级的情况下增加系统增益。通过在固定增益放大器上增加几个电阻来提供正反馈路径,此举可以减少整体的负反馈,从而获得更高的整体增益。
在典型的负反馈配置中,反馈给反相输入的输出部分被称为β,电路的增益为1/β。β=1时,整个输出信号被返回给反相输入端,由此实现单位增益缓冲器。β值较低时,实现的增益较高。

图1. 负反馈:非反相运算放大器配置
为了提高增益,必须降低β。这可以通过增加R2/R1的比率来实现。但是,目前对于固定增益的的差动放大器还没有办法通过降低其传输到反相端的反馈来提高整体增益,因为这需要用到更大的反馈电阻或更小的输入电阻。通过将输出反馈提供给差动放大器的基准引脚,也就是同相输入端,即可提高之前的固 定增益放大器的增益。此放大电路产生的复合反馈系数β(βc)是β-和β+之间的差值,该系数同时也将决定放大电路的增益和带宽。请注意,β+提供的是正反馈,因此必须确保净反馈仍然为负(β– > β+)。

图2. 组合β
为了使用β+调节电路增益,第一步是计算β-(初始电路的β)。注意,衰减项G_attn是差动放大器的正输入信号与运算放大器的同相端输入之比。

一旦选定所需的增益,就可以确定所需的β以及β+。因为固定增益放大器的增益是已知的,所以能够很简单地计算出β。

β+的量正好是输出信号返回至运算放大器的同相输入端的一部分。记住,反馈会通过β+路径至基准引脚,反馈信号会通过两个电阻的分压器(见图3),这两个分压电阻阻值必须要通过计算才能实现正确的β+。
差动放大器的一个关键特性是CMRR。正极和负极网络上的电阻比是否匹配对于能否实现出色的CMRR至关重要,因此电阻(R5)也应该与正输入电阻串联,以平衡基准引脚上增加的电阻。

图3. 四电阻固定增益差分放大器:增益调整
为了确定电阻R3和R4,可以使用戴维南等效电路来简化分析。

图4. 戴维南等效电路
如上所述,为了保持良好的CMRR,必须添加R5。R5的值由R3和R4的并联组合决定,其系数与输入衰减器中的电阻相同。因为R1/R2 = (1/G_attn) - 1这个比率,R1和R5分别可以用比率已定的R2和R3||R4代替。


图5. 经过简化的正输入电阻网络
如前所述, VOUT至简化电路的A_in+的增益必须等于1/β+。

由于R3和R4拉载运算放大器,所以应该注意不要选择太小的值。一旦选定了所需的负载(R3 + R4),就可以利用公式4轻松计 算得出R3和R4的值。R3和R4确定之后,可以利用R3||R4 × β计算得出R5。
因为这种技术依赖于电阻比,所以具备很高的灵活性。在噪声和功耗之间需要进行权衡,电阻值应该足够大,可以防止运算放大器过载。此外,由于R5与R3和R4成比例,所以应该使用相同类型的电阻,以在各种温度下保持良好性能。如果R3、R4和R5一起漂移,那么这个比例将保持不变,并且由于这些电阻,即使有热漂移,也会保持在最低水平。最后,由于运算放大器的增益更高,所以获得的带宽会按照增益带宽积的βc/β比例降低。
AD8479可以实现这种技术的典型应用,它是一个单位增益 的高共模差动放大器。AD8479能够在±600 V共模下测量差分信号,并且具有固定的单位增益。有些应用需要的增益大于单位增益,因此很适合采用之前提到的技术。电流检测应用需要的 另一个常见增益是10,因此可以让G1 = 10。
由于AD8479会衰减共模信号,获得更高的差分信号,然后获得单位系统增益,所以在实施增益调整时需要考虑这一点。

由于正基准的增益为60,正输入的增益为1,所以电路的噪声增益为61。此外,由于总体增益是一致的,所以G_attn必须是1/噪声增益:

R3和R4可以使用公式6计算得出:

AD8479的增益为指定增益,负载为2 kΩ,所以R3 + R4的目标增益如下。

为了使用标准电阻值构建这个电阻,所以需要使用并联电阻来实现比使用单个标准电阻可以实现的更准确的比例。


图6. G = 10时,AD8479的最终原理图
从图7中可以看出,获得的输出(蓝色)是预期输入(黄色)的10倍。

图7. G = 10时,AD8479的输入和输出示波器捕捉图
增益为10的电路的标称带宽应为典型的AD8479带宽的1/10,这是因为βc/β– = 1/10,而实际测量的–3 dB频率为48 kHz。

图8. G = 10: –3 dB频率时的AD8479
图9显示获得的脉冲响应和特征与预期一致。压摆率与标准的AD8479压摆率一致,但因为带宽减小,所需的建立时间更长。

图9. G = 10: 脉冲响应时的AD8479
由于新电路为运算放大器的两个输入端提供反馈,所以运算放大器的共模会受到两个输入端的信号影响。这会改变电路的输入电压范围,因此应该对其进行评估,以免过度驱动运算放大器。此外,由于噪声增益增加,所以输出端的噪声电压频谱和峰峰值也会按相同比例增加;但是,当信号被引用到输入时, 产生的影响可以忽略不计。最后,增益增加的电路的CMRR与前一个电路的CMRR相等(假设R3、R4和R5电阻不会额外增加共模误差)。由于R5是用于在增加R3和R4的情况下来修正CMRR的,所以可以对CMRR进行调优,使其比原来使用R5的电路更好。但是,这需要进行微调,且在此过程中,您需要适当权衡和调整CMRR的增益误差。
实施这个过程时,您可以利用固定增益差分放大器的优点,而不受其固定特性限制。由于该技术是通用的,它还可以和许多其他差分放大器一起使用。在不增加任何有源组件的情况下,简单增加三个电阻可以在信号链中实现更高的灵活性,这有助于降低成本、复杂性和电路板大小。

图7. G = 10时,AD8479的输入和输出示波器捕捉图
增益为10的电路的标称带宽应为典型的AD8479带宽的1/10,这是因为βc/β– = 1/10,而实际测量的–3 dB频率为48 kHz。

图8. G = 10: –3 dB频率时的AD8479
图9显示获得的脉冲响应和特征与预期一致。压摆率与标准的AD8479压摆率一致,但因为带宽减小,所需的建立时间更长。

图9. G = 10: 脉冲响应时的AD8479
由于新电路为运算放大器的两个输入端提供反馈,所以运算放大器的共模会受到两个输入端的信号影响。这会改变电路的输入电压范围,因此应该对其进行评估,以免过度驱动运算放大器。此外,由于噪声增益增加,所以输出端的噪声电压频谱和峰峰值也会按相同比例增加;但是,当信号被引用到输入时, 产生的影响可以忽略不计。最后,增益增加的电路的CMRR与前一个电路的CMRR相等(假设R3、R4和R5电阻不会额外增加共模误差)。由于R5是用于在增加R3和R4的情况下来修正CMRR的,所以可以对CMRR进行调优,使其比原来使用R5的电路更好。但是,这需要进行微调,且在此过程中,您需要适当权衡和调整CMRR的增益误差。
AD8479
●共模电压范围:±600 V
●轨到轨输出
●固定增益:1
●宽电源范围:±2.5 V至±18 V
●电源电流:550 μA(典型值)
●出色的交流规格
●共模抑制比(CMRR):90 dB(最小值)
●310 kHz带宽
●高精度直流性能
●增益非线性度:5 ppm(最大值)
●失调电压漂移:10 µV/°C(最大值)
●增益漂移:5 ppm/°C(最大值)
实施这个过程时,您可以利用固定增益差分放大器的优点,而不受其固定特性限制。由于该技术是通用的,它还可以和许多其他差分放大器一起使用。在不增加任何有源组件的情况下,简单增加三个电阻可以在信号链中实现更高的灵活性,这有助于降低成本、复杂性和电路板大小。
(来源:亚德诺半导体)
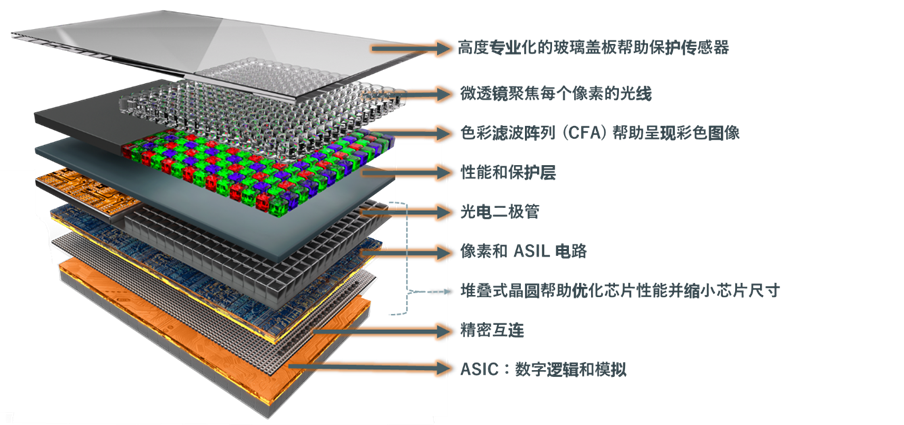
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
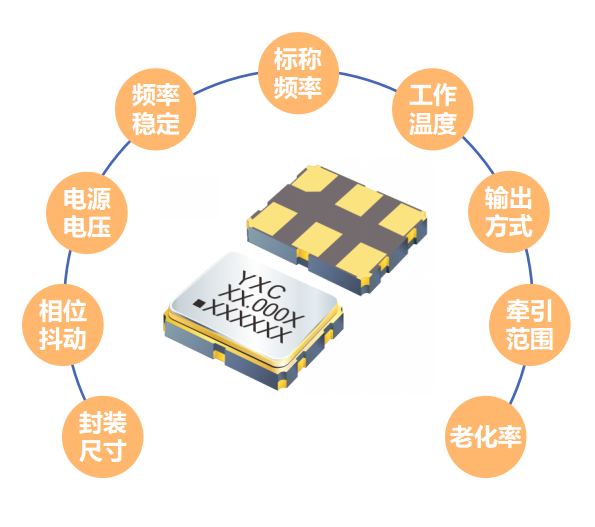
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
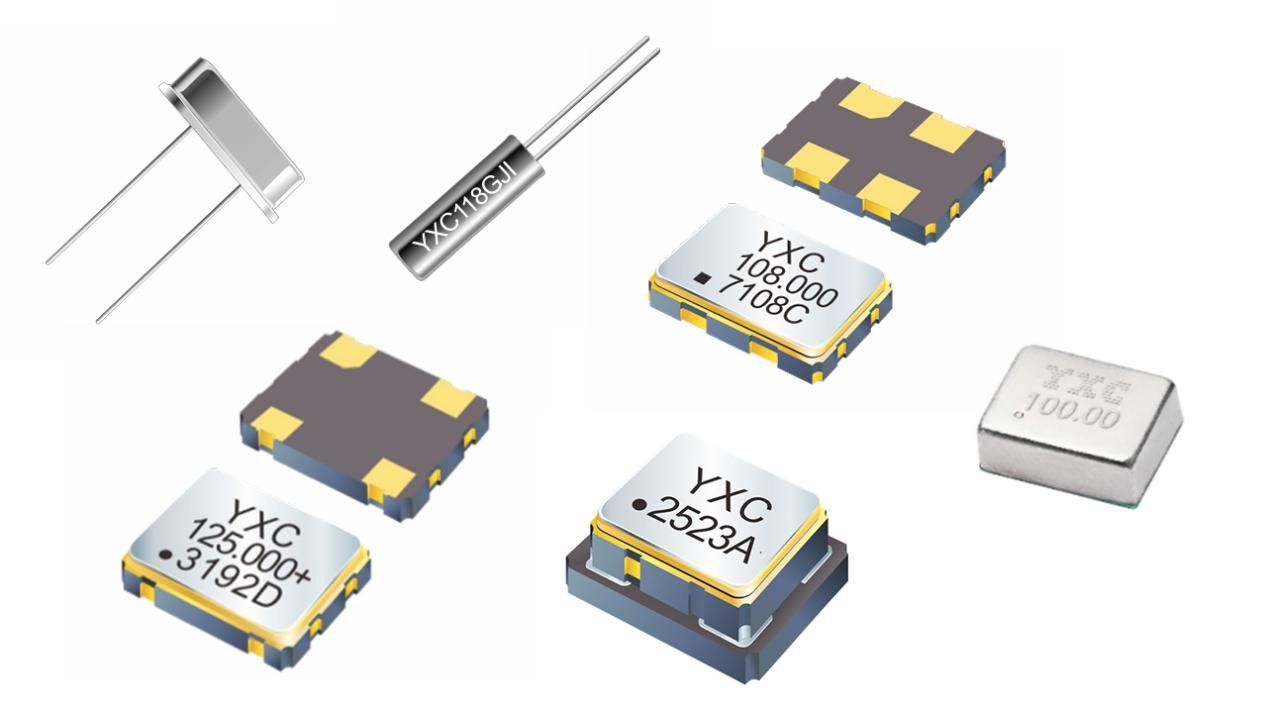
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。
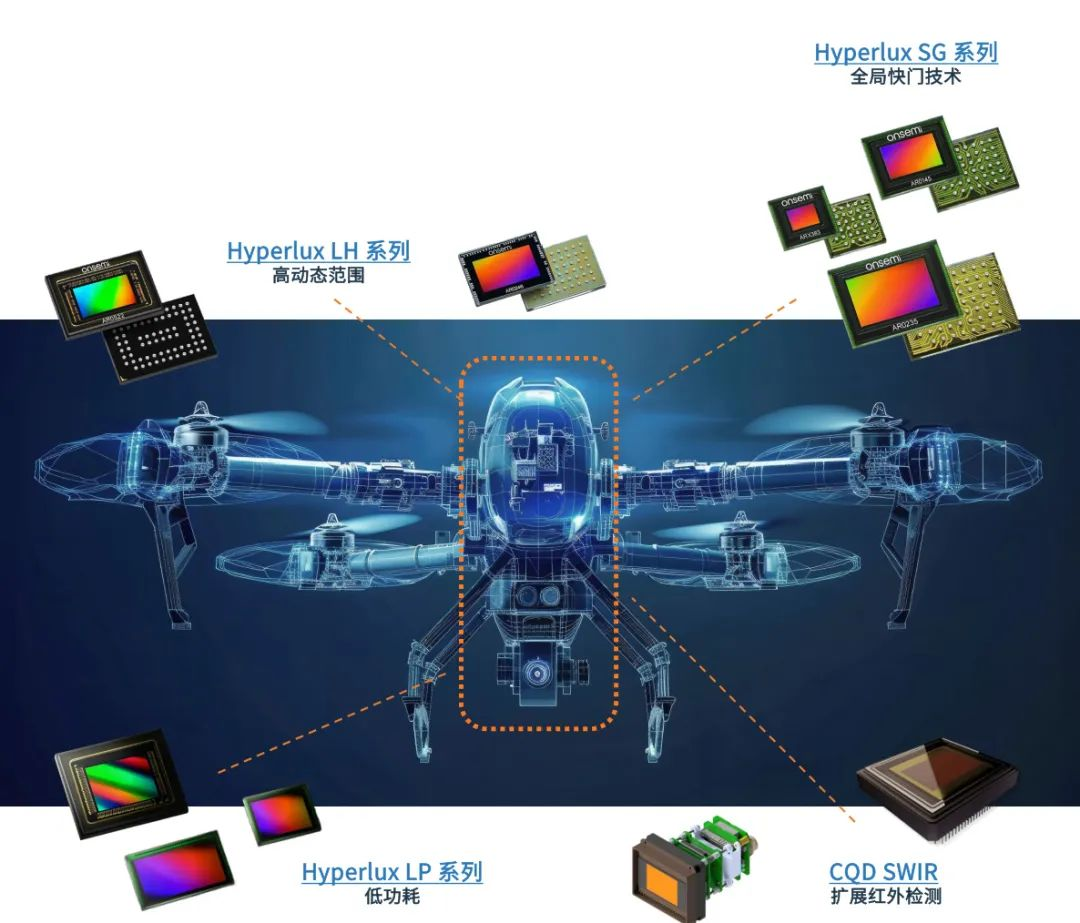
无人机已不再是简单的飞行器,而是集成了尖端感知与决策能力的空中智能载体。其核心系统——特别是自主导航与感知技术——是实现其在测绘、巡检、农业、物流、安防等多个领域高效、精准作业的关键。本文将深入剖析无人机如何通过这些核心技术“看见”、“思考”并“规划”路径,实现真正意义上的自主飞行能力。

压控晶体振荡器(Voltage-Controlled Crystal Oscillator, VCXO)是一种关键的高精度频率源,其核心特性在于能够通过施加外部控制电压来精细调节其输出频率。其频率控制过程依赖于精密的电路设计和晶体的独特物理特性,主要涉及以下核心原理:



