发布时间:2021-06-1 阅读量:2261 来源: Excelpoint世健 发布人: Joisse
导读:电信号链有多种形式。它们可以由不同的电气元件组成,包括传感器、执行器、放大器、模数转换器(ADC)、数模转换器(DAC),甚至微控制器。整个信号链的准确性起着决定性的作用。为了提高准确性,首先必须识别并尽量减小每个信号链中的各个误差。由于信号链的复杂性,这种分析将会是一项艰巨的任务。
本文介绍了一种精密数模转换器(DAC)的信号链误差预算计算工具。本文将描述与DAC连接的元件的单项误差影响。最后,本文将逐步演示如何使用该工具来识别和纠正这些问题。
精密数模转换器(DAC)误差预算计算器的计算精准,易于使用,可以帮助开发人员为特定应用选择最合适的元件。由于数模转换器(DAC)通常不会单独出现在信号链中,而是连接到基准电压和运算放大器(例如作为参考缓冲器),因此必须重视和总结这些额外的元件以及它们的各个误差。为了更好地理解这个概念,我们首先看看主要元件的单项误差影响,如图1所示。

图:数模转换器(DAC)信号链的主要元件
基准电压有四个主要的误差影响。第一个与初始精度(初始误差)有关,表现在25°C(指定温度)的生产测试中测量的输出电压不稳定。此外,还有与温度系数相关的误差(温度系数误差)、负载调节误差和线路调节误差。初始精度和温度系数误差对总误差影响最大。
在运算放大器中,输入失调电压误差和电阻的阻值误差影响最大。输入失调电压误差是指为了获得零电压输出而在输入端强行施加的很小的电压差。增益误差是用于设置闭环增益的相应电阻的阻值误差引起的。其他误差由偏置电流、电源抑制比(PSRR)、开环增益、输入失调电流、CMRR失调和输入失调电压漂移引起。
对于数模转换器(DAC)本身,数据表中给出了各种类型的误差,例如积分非线性(INL)误差,它与理想输出电压和给定输入代码测量的实际输出电压之差有关。其他误差类型有增益误差、失调误差和增益温度系数误差。有时将它们组合在一起形成总不可调整误差(TUE)。TUE和所有测量输出DAC误差有关,即INL、失调和增益误差,以及在电源电压和温度范围内的输出漂移。
由于不同的误差源通常不相关,计算信号链中总误差的最精确方法是统计平方公差法:

收集各个元件的误差通常是一项繁琐的任务,现在我们可以使用误差预算计算器来简化这项工作,得到同样精确的计算结果。
使用精密数模转换器(DAC)
误差预算计算器的步骤
首先,使用误差预算计算器,从三种数模转换器(DAC)类型中进行选择:电压输出DAC、乘法DAC和4mA~20mA电流源DAC。接下来,设置误差计算所需的温度范围和电源电压纹波,后者对PSRR误差将起决定性的作用。输入这些值后,计算器将生成一个图表,显示信号链中每个元件的各个误差影响,如图2所示。

图:ADI误差预算计算器中误差影响的表示
这个示例中的总误差主要受基准电压的影响。通过使用更精确的参考模块可以改进这一信号链。
数模转换器(DAC)的集成电阻负责内部反相放大器的比较,从而提高精度,对数模转换器(DAC)的总误差起决定性的作用。在没有集成电阻或内部反相放大器的数模转换器(DAC)中,这些参数可以单独设定,如图2所示。
误差预算计算器可靠且易于使用,使创建精密数模转换器(DAC)信号链和快速评估设计权衡变得更容易。
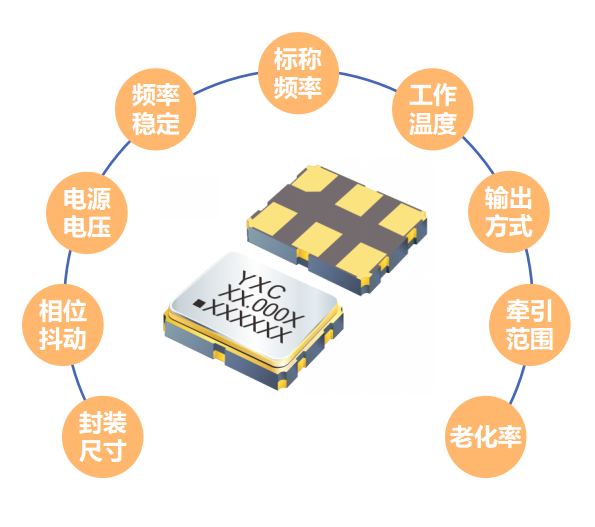
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
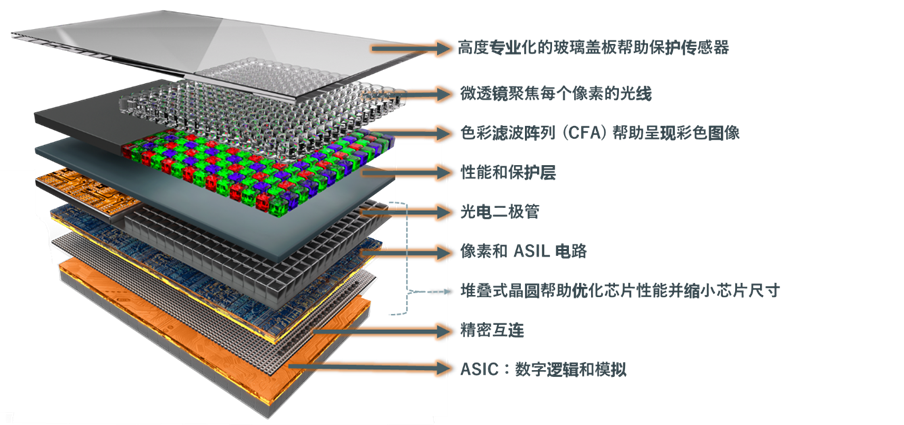
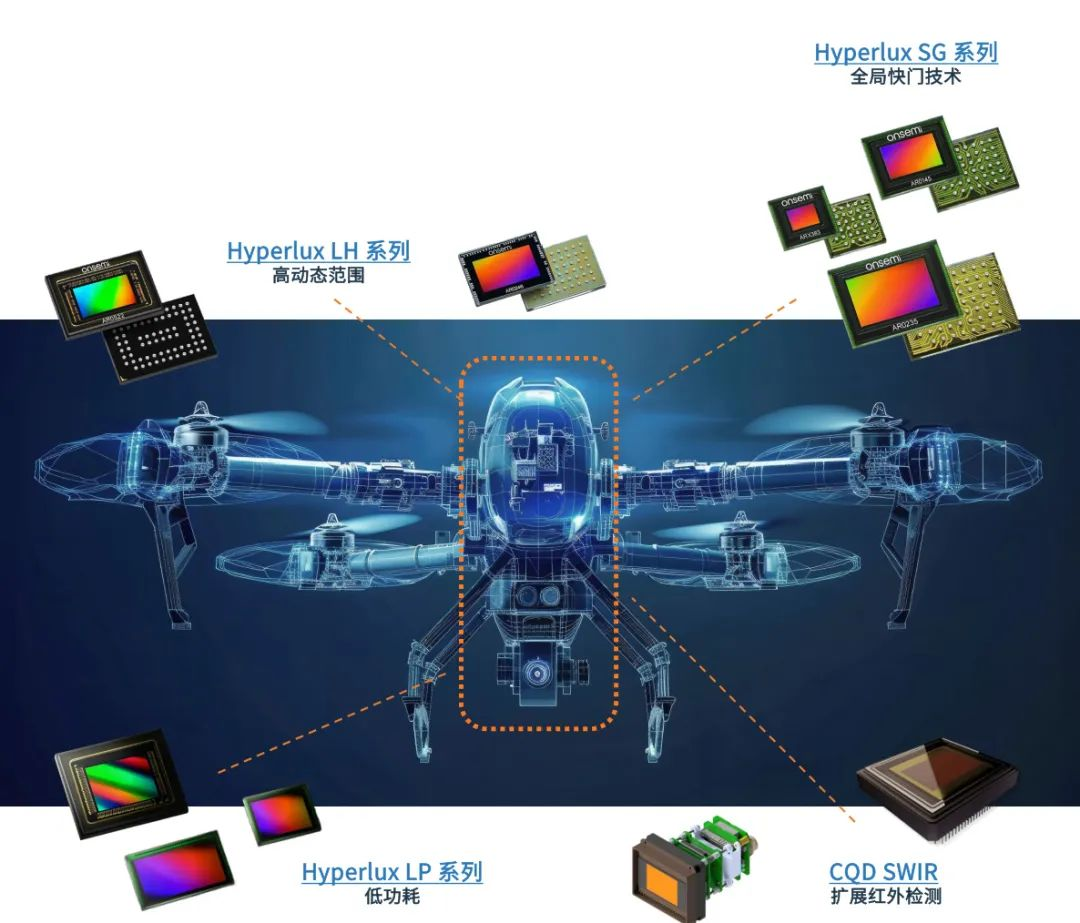
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。
无人机已不再是简单的飞行器,而是集成了尖端感知与决策能力的空中智能载体。其核心系统——特别是自主导航与感知技术——是实现其在测绘、巡检、农业、物流、安防等多个领域高效、精准作业的关键。本文将深入剖析无人机如何通过这些核心技术“看见”、“思考”并“规划”路径,实现真正意义上的自主飞行能力。



