发布时间:2019-12-16 阅读量:1287 来源: 德州仪器 发布人: CiCi
要实现自主,机器人不仅仅只需要人工智能(AI),还需要很多传感器、传感器融合以及边缘实时推理。由于深度卷积神经网络的优点已得到公认,激光雷达对更为先进的数据处理的需求正在把神经网络推向新的拓扑结构,以实现自主。
第一个机器人在20世纪50年代末、60年代初诞生,但严格意义上它不算机器人,只是一台“可编程的物品传送设备”,它被用于移动通用汽车公司生产线上压铸机周围的产品。1954年专利的第一句话强调了本发明的可编程性和通用性,并且表明可编程性要求传感器确保程序、期望轨迹或功能和实际运动之间的一致性。
时至今日,机器人并没有完全偏离最初的概念:如今的机器人是可以进行编程的。它们需要感知自身的环境,以确保所做的事情和被设定要做的事情是一致的。而且,它们需要在自身的环境中移动。过去50-60年来所发生的变化主要是在复杂性、速度以及应用这些基本概念的领域方面有所增加。
虽然第一批机器人主要用来移动压铸件,但机器人之父约瑟夫·恩格尔伯格(Joseph Engelberger)深受阿西莫夫机器人第一定律的影响——机器人不得伤害人类,或看到人类受到伤害而袖手旁观。他把机器人部署在可以保护人类的地方。保护人类也是传感器数量不断增加的驱动力,特别是在协作机器人(cobots)或自动导引车(AGVs)中。
是什么推动着机器人产业的发展?
为了更好地理解对自主机器人的追求,让我们回顾一下Alex Wissner-Gross的“智能定律”方程式:它是一种熵力,解释了机器人学的发展趋势:
F = T ∇ Sτ (1)
其中F指的是使未来行动自由最大化的力,T指的是定义整体强度的温度(可用资源),以及S指的是时间范围tau内的熵。
机器人学作为一门工业和科学,其目标是通过增加嵌入式模拟智能来最大限度地提高未来机器人行动的自由度。这就需要:
l 有更多的传感器来获得更高精度的机器人周围环境模型。
l 有更好的传感器连接到控制算法(和更分散的控制算法)。
l 有更好的算法从传感器数据中提取尽可能多的信息。
l 有更好的执行器来根据控制算法的决策更快更准确地行动。
不妨看一看当今的科技领域,机器人已经获得了很大的自主性,并且正在使用来自互补性氧化金属半导体相机传感器、激光雷达和雷达的传感器来适应各种各样的应用。虽然相机的角度分辨率和动态范围比雷达大得多,但相机不能提供激光雷达所具有的动态范围,也不能在烟雾弥漫或多尘的环境中工作。

图1:工厂环境中的现代机械臂示例
由于机器人被设计成适应最广泛应用的最灵活的选择,因而它们需要在低光、多尘或明亮的环境中工作。这种灵活性可以通过组合传感器信息——aka、传感器融合来实现。换句话说,不同传感器的信息可用于重建机器人环境的弹性表示,从而在更多应用中实现自主性。例如,如果一个相机被暂时覆盖,则其他传感器必须能够使机器人安全运行。为确保机器人能对其所处环境有全方位的了解,机器人传感器数据需要以限时的方式进行路由,并用少量的电缆连接到机器人控制器,以最大限度地提高连接的可靠性。
如今,高带宽低延迟总线主要基于低压差分信号(LVDS)。然而, LVDS接口并没有标准,这就导致传感器到控制器的生态系统出现分裂,并且使来自不同供应商的混合和匹配解决方案变得困难。一旦传感器数据被传输到机器人控制器,一系列基于深度神经网络的机器学习算法可以帮助提高机器人所处环境的精度。用深度学习教父Yann LeCun、Yoshua Bengio和Geoffrey Hinton的话说,“深度学习允许由多个处理层组成的计算模型学习具有多个抽象层的数据表示。”这些深度神经网络可以在机器人内部用于快速、实时处理,也可以在云中用于元信息收集或更复杂的推理。

图2:机器人的不同感应能力
对于大多数机器人来说,得益于边缘处理所允许的固有低延迟,边缘推理是确保机器人能够对其环境的变化做出快速反应的重要参数。边缘推理可用于卷积神经网络,类似的神经网络拓扑结构可用于图像分类或预防性维护估算,深度Q网络可用于机器人路径规划,或用于为解决一类特定问题而设计的自定义神经网络。
展望未来
在未来,传感器似乎不太可能有太大的变化,但所涉及的处理将有所不同。成像传感器可能变成高光谱或可提供更高的分辨率。激光雷达可能有更高的波长、更安全、并具有更长的范围。雷达传感器可能配备集成天线,但这些并不会有显著变化。未来将改变的是信息使用和聚合的方式。
例如,在传感器集线器上,引入单对以太网(aka T1)和数据线供电(电气和电子工程师学会802.3bu-2016)将简化传感器集线器接口的设计,从而使更传感器组合更广泛和实现标准化配电。在控制方面,强化学习将由于最近的突破而得到加强,从而解决了诸如从所有可能的失败中学到的高成本,以及由于学习模式的偏斜而学习错误行为的惩罚等难题。
在归类方面,大多数基于卷积神经网络的方法并没有从激光雷达提供的体素中完全提取出所有的3D信息。下一代深度神经网络将利用框架提供的非欧几里德机器学习(或几何机器学习)中的最新进展,如PointNet、ShapeNet、Splatnet和Voxnet等框架。边缘推理和传感器融合将融合到我所看到的多个传感器源的层次推理中。在这里,数据将通过更简单的推理网络做出更快的回路反应,例如电流控制神经网络,以改善现有比例-积分-微分网络的性能,一直到能够提供预测性维护诊断并处于中间位置的更加复杂的长期-短期记忆网络。神经网络将能够补偿机器人结构的微小误差,并提供更高的位置精度和更平滑的运动。
总结
自主机器人进化是一个始终变化的目标。当乔治·德沃尔(George Devol)在1954年申请专利时,此机器显然比当时任何基于凸轮或人工操作的机器都更自主。但按照今天的标准,这将是一个非常僵化的设置,甚至不会出现在自主程度的排名上。这种剧烈的变化很可能在我们意识到之前再次发生。
现在人们认为,轮式机器人和协作机器人正处于自主的边缘,当人类靠近它们时,它们会减速,甚至在移动时也能避免撞到人类。随着嵌入式模拟智能技术的迅速变化,这些“处于边缘”的创新型机器人在不久的将来不会被视为具有自主性,因为这个行业正在以如此之快的速度发展并不断产生新技术,从而使得机器人技术比以往任何时候都更加自主。

在全球科技竞争格局深刻重构的背景下,中国电子产业正迎来国产替代与自主创新的历史性机遇。第106届中国电子展紧扣《"十四五"规划》制造强国战略,聚焦基础电子元器件、集成电路等"卡脖子"领域,集中展示从材料、设备到应用的国产化突破成果。
在现代电子系统设计中,混合信号PCB的接地策略直接影响电路性能与信号完整性。晶振作为时序控制的核心元件,其接地方式需严格遵循噪声抑制与电流回流路径优化的基本原则。
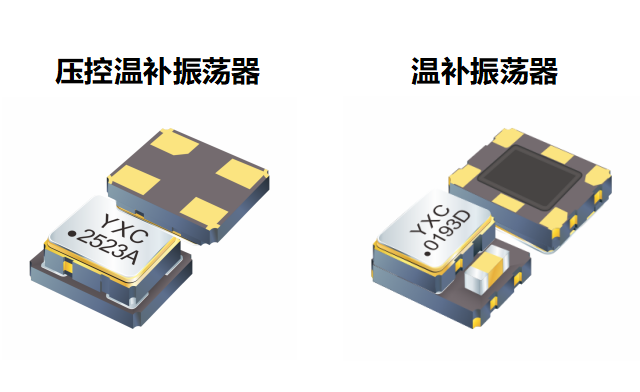
在精密电子系统中,时钟源的稳定性与精度直接影响整体性能。温补晶振(TCXO)凭借其优异的温度补偿特性,长期以来广泛应用于通信、导航等领域。然而,随着现代电子设备对频率控制要求的日益提高,压控温补晶振(VC-TCXO)因其兼具温度补偿与电压调谐能力,逐渐成为高精度场景下的潜在替代方案。

据最新消息,苹果公司计划于2027年推出其首款机器人产品,这款代号为"Eve"的虚拟伴侣机器人,将结合苹果在硬件设计、人工智能和用户体验方面的优势,开创消费级机器人新品类。不同于传统功能性机器人,苹果的这款产品更注重情感连接和个性化陪伴,有望重新定义人机交互的未来。

在当前全球电子制造业向智能化、绿色化加速转型的背景下,产业链协同创新已成为突破技术壁垒的关键路径。本次走访聚焦微焦点X-RAY检测、自动化测试烧录一体化、半导体封装工艺等核心技术领域,通过构建"技术攻关-场景验证-生态协同"的三维合作模型,旨在打通从实验创新到规模化应用的最后一公里。



