发布时间:2019-09-16 阅读量:896 来源: 我爱方案网 作者: Del Jones
在JESD204C入门系列的第1部分中,通过描述它解决的一些问题,对JESD204标准的新版本进行了说明。通过描述新的术语和特性来总结B和C版本标准之间的差异,然后逐层概述这些差异。因为第1部分已经奠定了理解基础,现在我们来进一步研究一下JESD204C标准几个更值得注意的新特性。
64b/66b和64b/80b链路层
对于64b/66b链路层,66位数据块由两个同步头位,后接八个八位位组的样本数据组成,其中部分是基于IEEE 802.3第49条定义的数据块格式。与IEEE标准不同的是,它没有编码——有效载荷数据只是转换器样本数据,由传输层打包到数据帧中。由于没有编码来确保发生一定数量的数据转换来提供dc平衡,因此必须对样本数据进行加扰。这些加扰的八位位组的帧数据被直接放入链路层,两个同步头位附加在其中。
64b/66b数据块的格式如图1所示。该示例展示了这样的情况:一个数据通道由帧组成,每个帧包含来自一个转换器的一个样本。块映射规则与来自JESD204B标准的帧映射规则非常相似。按顺序完成八位位组到64位数据块的映射,其中D0表示帧的第一个八位位组。例如,如果F = 8,D0表示JESD204C帧的第一个八位位组,D7表示JESD204C帧的最后一个八位位组。该帧的第一个八位位组的MSB是Converter0的Sample0的MSB(与JESD204B一样)。例如,如果F = 2,D0和D1代表第一个帧,D2和D3代表第二个帧,以此类推。
为了与JESD204B中使用的方法保持一致,多块中的八位位组按MSB到LSB的顺序被转移到加扰器/解扰器中。
在E = 1的情况中,每个多块都从帧边界开始。如果E > 1,扩展多块将从(必须从)帧边界开始。有关更多信息,请参考多块(MB)和扩展多块(EMB)章节。

图1.64b/66b数据块格式示例,LMFS = 1.1.2.1,N = N’ = 16。
同步头是一个2位未加扰值,位于每个数据块的开始位置,其内容经过解析之后,用于解码单个同步转换位。这些位要么采用0-1序列,表示逻辑1,要么采用1-0序列,表示逻辑0。表1列举了同步头的转换位值。
表1.同步头位值

64b/80b数据块的格式如图2所示。除了样本数据的八个八位位组和两个同步头之外,还具有两个填充位,位于每个八位位组之间。填充位的值由17位PRBS序列决定,以减少杂散,并确保适当数量的数据转换以保持dc平衡。未加扰的填充位在样本数据加扰之后插入到块中。

Figure 2. 64b/80b block format example for LMFS = 1.1.2.1, N = N’ = 16.
图2.64b/80b数据块格式示例,LMFS = 1.1.2.1,N = N’ = 16。
提供64b/80b选项是为了与8b/10b保持相同的时钟比,帮助简化锁相环(PLL)设计,同时最小化杂散。对于希望通过使用前向纠错或利用同步字提供的其他功能的应用,相比8b/10b,更应该选择64b/80b,稍后将就这一问题进行详细讨论。
多块(MB)和扩展多块(EMB)
JESD204C多块中包含32个块。每个多块中的32个同步转换位构成一个32位同步字。稍后,我们将就此进行详细讨论。扩展多块是一个E多块容器,必须包含整数数量的帧。当多帧不包含整数数量的帧时,要求E > 1。多块和扩展多块的格式如图3所示。
多块可以是2112 (32×66)位,或者是2560 (32×80)位,具体由所用的64位编码方案决定。对于大多数场景,扩展多块只是一个多块。JESD204C中引入了E参数,确定了扩展多块中的多块数量。E的默认值为1。如上所述,当帧F中的八位位组的数量不是2的倍数时,该配置要求E > 1。E的公式为:E = LCM(F, 256)/256。发送12位样本且N’=12时,一般选择这些配置,以最大化链路中的带宽效率。这一要求确保EMB边界与帧边界一致。
图4和图5所示为E > 1的JESD204C配置示例。所示的JESD204C配置适用于以下情况:LMFS = 2.8.6.1,N’ = 12,E = 3。图4显示了传输层的映射情况。在这个配置中,每个通道有4个12位样本,相当于6个八位位组。由于多块的每个块都需要8个八位位组,因此该块中填充了来自后续帧的2个八位位组(1.33个样本)。

图3.JESD204C多块和扩展多块的格式。


图4.传输层映射,LMFS = 2.8.6.1,N’ = 12,E = 3。
图5显示了如何使用来自传输层的数据帧来形成块和多块。如图所示,可以看到帧边界与每三个块的块边界对齐。由于多块由32个块组成,所以要在第三个多块之后才能和多块对齐。因此,E = 3。
LEMC是扩展多块计数器,大致相当于8b/10b链路层中的LMFC。SYSREF对系统中的所有LEMC进行对齐,并使用LEMC边界来确定同步和通道对齐。


图5.串行输出多块/帧对齐,LMFS = 2.8.6.1,N’ = 12,E = 3。
同步字
32位同步字由多块中32个块的每个同步头位组成,其中第一个传输的是位0。同步字用于提供通道同步,并使能确定性延迟。此外,它还可以选择性地提供CRC错误校验、前向纠错,或者提供一个命令通道,供发射器与接收器通信。
32位同步字有三种不同的格式选项。在每种情况下,都需要多块序列的结束,因为它用于获得多块同步和通道对齐。表2和表3显示了两个最常见用例中可用的不同位字段。
表2.CRC-12同步字






64b/66b链路操作
当使用64b/66b链路层时,链路的建立过程从同步头对齐开始,然后是扩展多块同步,最后是扩展多块对齐。
同步头对齐
同步头中的同步转换位确保在每个块边界(66位)都有一个数据转换。JESD204C接收器中的状态机检测到一个数据转换,在66位后再查找另一个转换。如果状态机检测到64个连续以66位间隔进行的位转换,则会实现同步头锁定(SH_lock)。如果没有检测到64个连续转换,则重新启动状态机。

图6.JESD204C扩展多块(通道)对齐。
扩展多块同步
一旦实现同步头对齐,接收器就会在转换位中查找扩展多块结束(EoEMB)序列(100001)。同步字的结构确保此序列只能在适当的时间发生。一旦确定EoEMB,状态机将检查每32个同步字,以确保存在多块结束导频信号(00001)。如果E = 1,EoEMB位也会存在导频信号。如果E > 1,那么每个E × 32转换位,导频信号都将包含EoEMB位。一旦检测到四个连续的有效序列,就可以实现扩展多块结束锁定(EMB_LOCK)。继续监测每个E × 32转换位,如果没有检测到有效的序列并重置对齐过程,则EMB_LOCK丢失。
扩展多块(通道)对齐
使用64b/66b链路层时的通道对齐与使用8b/10b链路层时的通道对齐非常相似,每个通道上的JESD204C接收器都使用一个弹性缓冲区来存储传入的数据。这被称为扩展多块对齐,缓冲区开始在EoEMB边界(而不是在使用8b/10b链路层时ILAS期间的/K/至/R/边界)存储数据。图6说明了如何实现通道对齐。每个通道的接收缓冲区在接收到EoEMB的最后一位之后开始缓冲数据(最后一个接收通道除外)。接收到最后一个接收通道的EoEMB之后,会触发释放所有通道的接收缓冲区,所以现在所有通道都是对齐的。
错误监测和前向纠错
JESD204C同步字选项让用户能够监测或纠正JESD204数据传输中可能发生的错误。纠错会导致额外的系统延迟。对于大多数应用,使用CRC-12同步字进行错误监测是可行的,因为它提供了大于1 × 10-15的误码率(BER)。
JESD204C发射器中的CRC-12编码器接收每个多块的加扰数据位,并计算12个奇偶校验位。这些奇偶校验位在随后的多块中传输到接收器。接收器同样将从接收到的每个数据多块中计算12个奇偶校验位,并与同步字中接收到的位进行对比。如果所有奇偶校验位都不匹配,则接收到的数据中至少存在一个错误,可以触发错误标志。
对于对额外延迟不敏感但对错误敏感的应用(例如测试和测量设备),使用FEC可以得到优于10 × 10-24的误码率。JESD204C发射器中FEC电路计算多块中已加扰数据位的FEC奇偶校验位,并在下一个多块的同步头位流上对这些奇偶校验位编码。接收器计算接收位的校验子,本地生成的奇偶校验位和接收到的奇偶校验位之间的差异就在于此。如果校验子为0,则假定接收到的数据位正确。如果校验子非0,则可以用它来确定最可能的错误。
FEC奇偶校验位的计算方法与CRC相似。FEC编码器接收多块的2048位加扰数据位,并添加26位奇偶校验位,以构建一个缩短的二进制循环码。该码的发生器多项式为:
对于每个多块,这个多项式可以纠正最多9位突发错误。
总结
为了满足未来几年数据密集型应用更快处理数据的需求,JESD204C将多千兆位接口定义为数据转换器和逻辑器件之间必需的通信通道。高达32 GSPS的通道速率和64b/66b编码使超高带宽应用能以最小的开销来提高系统效率。这些和其他标准改进对于5G通信、雷达和电子战应用都大有裨益。再加上纠错功能,先进的仪器仪表和其他应用都能够无错运行多年。
有关JESD204及其在ADI公司产品中的实现的更多信息,请访问ADIJESD204串行接口页面。有关ADI高速转换器的更多信息,请访问我们的RF转换器页面和28 nm RF 数据转换器页面。有关ADI收发器产品的更多信息,请访问我们的RadioVerse™页面。
碳化硅(SiC)功率器件正以颠覆性优势引领工业充电器变革——其超快开关速度与超低损耗特性,驱动功率密度实现跨越式提升,同时解锁了传统IGBT无法企及的新型拓扑架构。面对工业应用对高效隔离式DC-DC转换的严苛需求,本文将深入解析从600W至深入解析从600W至30kW全功率段的拓扑选型策略,揭示SiC技术如何成为高功率密度设计的核心引擎。
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
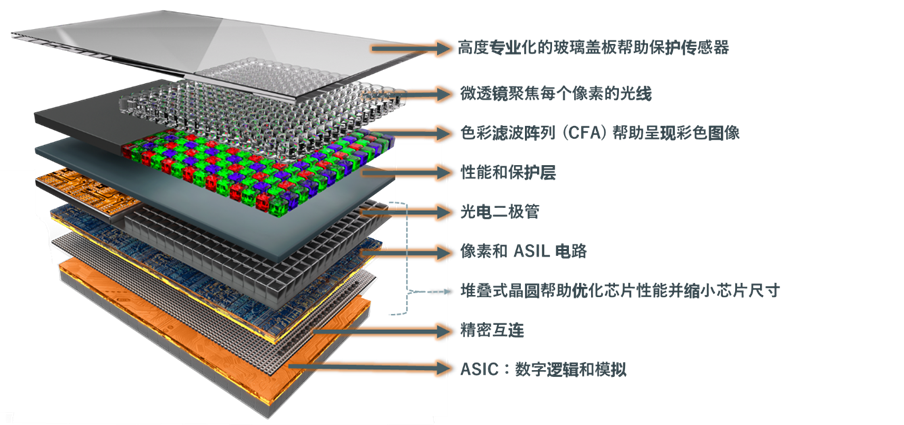
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。



