发布时间:2019-08-30 阅读量:1748 来源: 与非网 发布人: Jude
硬件工程师:主要负责电路分析、设计;并以电脑软件为工具进行PCB设计,待工厂PCB制作完毕并且焊接好电子元件之后进行测试、调试;
软件工程师:主要负责单片机、DSP、ARM、FPGA等嵌入式程序的编写及调试。FPGA程序有时属硬件工程师工作范畴。
设计中常犯的20个错误总结
错误一
这些拉高/拉低的电阻用多大的阻值关系不大,就选个整数5K吧。
点评:市场上不存在5K的阻值,最接近的是 4.99K(精度1%),其次是5.1K(精度5%),其成本分别比精度为20%的4.7K高4倍和2倍。20%精度的电阻阻值只有1、1.5、2.2、 3.3、4.7、6.8几个类别(含10的整数倍);类似地,20%精度的电容也只有以上几种值,如果选了其它的值就必须使用更高的精度,成本就翻了几 倍,却不能带来任何好处。
错误二
这部分电路只要要求软件这样设计就不会有问题。
点评:硬件上很多电气特性直接受软件控制,但软件是经常发生意外的,程序跑飞了之后无法预料会有什么操作。设计者应确保不论软件做什么样的操作硬件都不应在短时间内发生永久性损坏。
错误三
这点逻辑用74XX的门电路搭也行,但太土,还是用CPLD吧,显得高档多了。
点评:74XX的门电路只几毛钱,而CPLD至少也得几十块。成本提高了N倍不说,还给生产、文档等工作增添数倍的工作。
错误四
这板子的PCB设计要求不高,就用细一点的线,自动布吧。
点评:自动布线必然要占用更大的PCB面积,同时产生比手动布线多好多倍的过孔,在批量很大的产品中,PCB厂家降价所考虑的因素除了商务因素外,就是线宽和过孔数量,它们分别影响到PCB的成品率和钻头的消耗数量,节约了供应商的成本,也就给降价找到了理由。
错误五
我们这系统是220V供电,就不用在乎功耗问题了。
点评:低功耗设计并不仅仅是为了省电,更多的好处在于降低了电源模块及散热系统的成本、由于电流的减小也减少了电磁辐射和热噪声的干扰。随着设备温度的降低,器件寿命则相应延长(半导体器件的工作温度每提高10度,寿命则缩短一半)。
错误六
这些总线信号都用电阻拉一下,感觉放心些。
点评:信号需要上下拉的原因很多,但也不是个个都要拉。上下拉电阻拉一个单纯的输入信号,电流也就几十微安以下,但拉一个被驱动了的信号,其电流将达毫安 级,现在的系统常常是地址数据各32位,可能还有244/245隔离后的总线及其它信号,都上拉的话,几瓦的功耗就耗在这些电阻上了(不要用8毛钱一度电 的观念来对待这几瓦的功耗)。
错误七
CPU和FPGA的这些不用的I/O口怎么处理呢?先让它空着吧,以后再说。
点评:不用的I/O口如果悬空的话,受外界的一点点干扰就可能成为反复振荡的输入信号了,而MOS器件的功耗基本取决于门电路的翻转次数。如果把它上拉的话,每个引脚也会有微安级的电流,所以最好的办法是设成输出(当然外面不能接其它有驱动的信号)。
错误八
这款FPGA还剩这么多门用不完,可尽情发挥吧。
点评:FGPA的功耗与被使用的触发器数量及其翻转次数成正比,所以同一型号的FPGA在不同电路不同时刻的功耗可能相差100倍。尽量减少高速翻转的触发器数量是降低FPGA功耗的根本方法。
错误九
这些小芯片的功耗都很低,不用考虑。
点评:对于内部不太复杂的芯片功耗是很难确定的,它主要由引脚上的电流确定,一个ABT16244,没有负载的话耗电大概不到1毫安,但它的指标是每个脚可 驱动60毫安的负载(如匹配几十欧姆的电阻),即满负荷的功耗最大可达60*16=960mA,当然只是电源电流这么大,热量都落到负载身上了。
错误十
存储器有这么多控制信号,我这块板子只需要用OE和WE信号就可以了,片选就接地吧,这样读操作时数据出来得快多了。
点评:大部分存储器的功耗在片选有效时(不论OE和WE如何)将比片选无效时大100倍以上,所以应尽可能使用CS来控制芯片,并且在满足其它要求的情况下尽可能缩短片选脉冲的宽度。
错误十一
这些信号怎么都有过冲啊?只要匹配得好,就可消除了。
点评:除了少数特定信号外(如100BASE-T、CML),都是有过冲的,只要不是很大,并不一定都需要匹配,即使匹配也并非要匹配得最好。象TTL的输 出阻抗不到50欧姆,有的甚至20欧姆,如果也用这么大的匹配电阻的话,那电流就非常大了,功耗是无法接受的,另外信号幅度也将小得不能用,再说一般信号 在输出高电平和输出低电平时的输出阻抗并不相同,也办法做到完全匹配。所以,TTL、LVDS、422等信号的匹配只要做到过冲可以接受即可。
错误十二
降低功耗都是硬件人员的事,与软件没关系。
点评:硬件只是搭个舞台,唱戏的却是软件,总线上几乎每一个芯片的访问、每一个信号的翻转差不多都由软件控制的,如果软件能减少外存的访问次数(多使用寄存 器变量、多使用内部CACHE等)、及时响应中断(中断往往是低电平有效并带有上拉电阻)及其它争对具体单板的特定措施都将对降低功耗作出很大的贡献。
错误十三
这主频100M的CPU只能处理70%,换200M主频的就没事了
点评:系统的处理能力牵涉到多种多样的因素,在通信业务中其瓶颈一般都在存储器上,CPU再快,外部访问快不起来也是徒劳。
错误十四
CPU用大一点的CACHE,就应该快了。
点评:CACHE的增大,并不一定就导致系统性能的提高,在某些情况下关闭CACHE反而比使用CACHE还快。原因是搬到CACHE中的数据必须得到多次 重复使用才会提高系统效率。所以在通信系统中一般只打开指令CACHE,数据CACHE即使打开也只局限在部分存储空间,如堆栈部分。同时也要求程序设计 要兼顾CACHE的容量及块大小,这涉及到关键代码循环体的长度及跳转范围,如果一个循环刚好比CACHE大那么一点点,又在反复循环的话,那就惨了。
错误十五
一个CPU处理不过来,就用两个分布处理,处理能力可提高一倍
点评:对于搬砖头来说,两个人应该比一个人的效率高一倍;对于作画来说,多一个人只能帮倒忙。使用几个CPU需对业务有较多的了解后才能确定,尽量减少两个CPU间协调的代价,使1+1尽可能接近2,千万别小于1。
错误十六
这个CPU带有DMA模块,用它来搬数据肯定快。
点评:真正的DMA是由硬件抢占总线后同时启动两端设备,在一个周期内这边读,那边些。但很多嵌入CPU内的DMA只是模拟而已,启动每一次DMA之前要做 不少准备工作(设起始地址和长度等),在传输时往往是先读到芯片内暂存,然后再写出去,即搬一次数据需两个时钟周期,比软件来搬要快一些(不需要取指令,没有循环跳转等额外工作),但如果一次只搬几个字节,还要做一堆准备工作,一般还涉及函数调用,效率并不高。所以这种DMA只对大数据块才适用。
错误十七
为保证干净的电源,去偶电容是多多益善。
点评:总的来说去偶电容越多电源当然会更平稳,但太多了也有不利因素:浪费成本、布线困难、上电冲击电流太大等。去偶电容的设计关键是要选对容量并且放对地方,一般的芯片手册都有争对去偶电容的设计参考,最好按手册去做。
错误十八
用户操作错误发生问题就不能怪我了。
点评:要求用户严格按手册操作是没错的,但用户是人,就有犯错的时候,不能说碰错一个键就死机,插错一个插头就烧板子。所以对用户可能犯的各种错误必须加以保护。
错误十九
这板子坏的原因是对端的板子出问题了,也不是我的责任。
点评:对于各种对外的硬件接口应有足够的兼容性,不能因为对方信号不正常,你就歇着了。它不正常只应影响到与其有关的那部分功能,而其它功能应能正常工作,不应彻底罢工,甚至永久损坏,而且一旦接口恢复,你也应立即恢复正常。。
错误二十
我们的系统要求这么高,包括MEM、CPU、FPGA等所有的芯片都要选最快的。
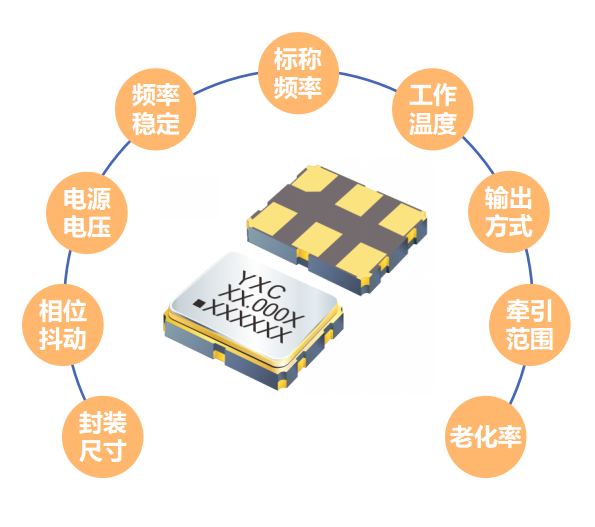
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
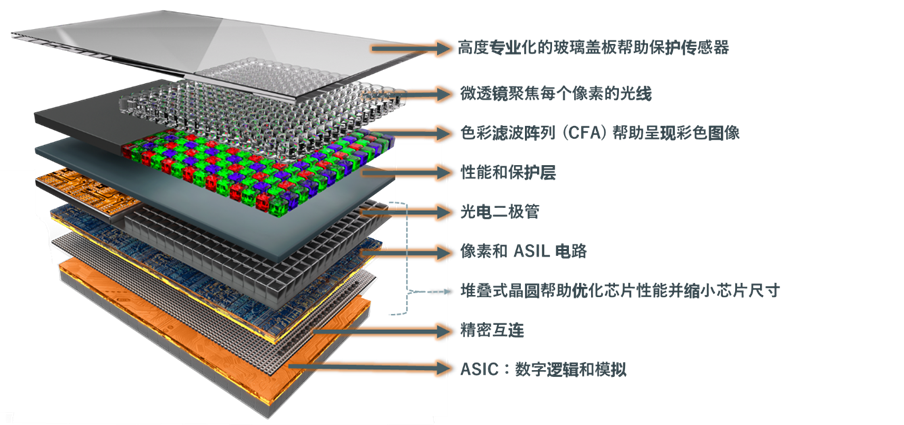
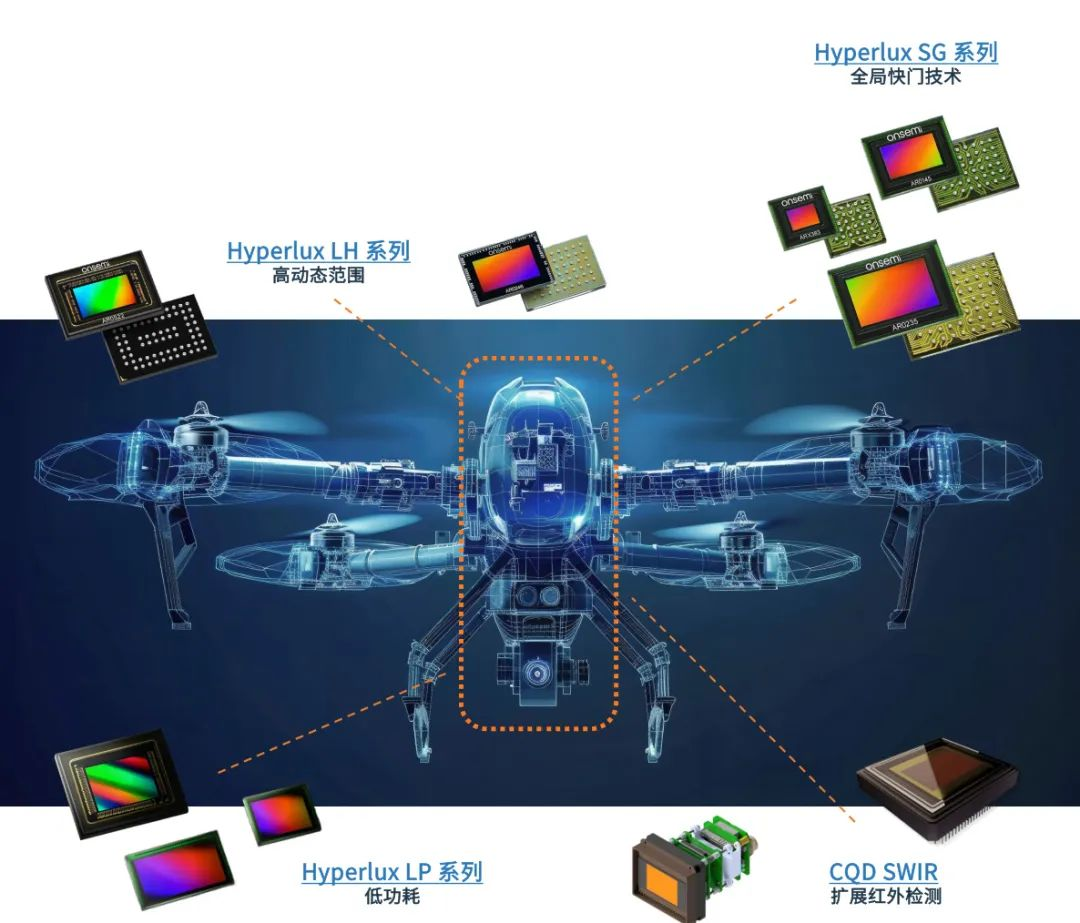
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
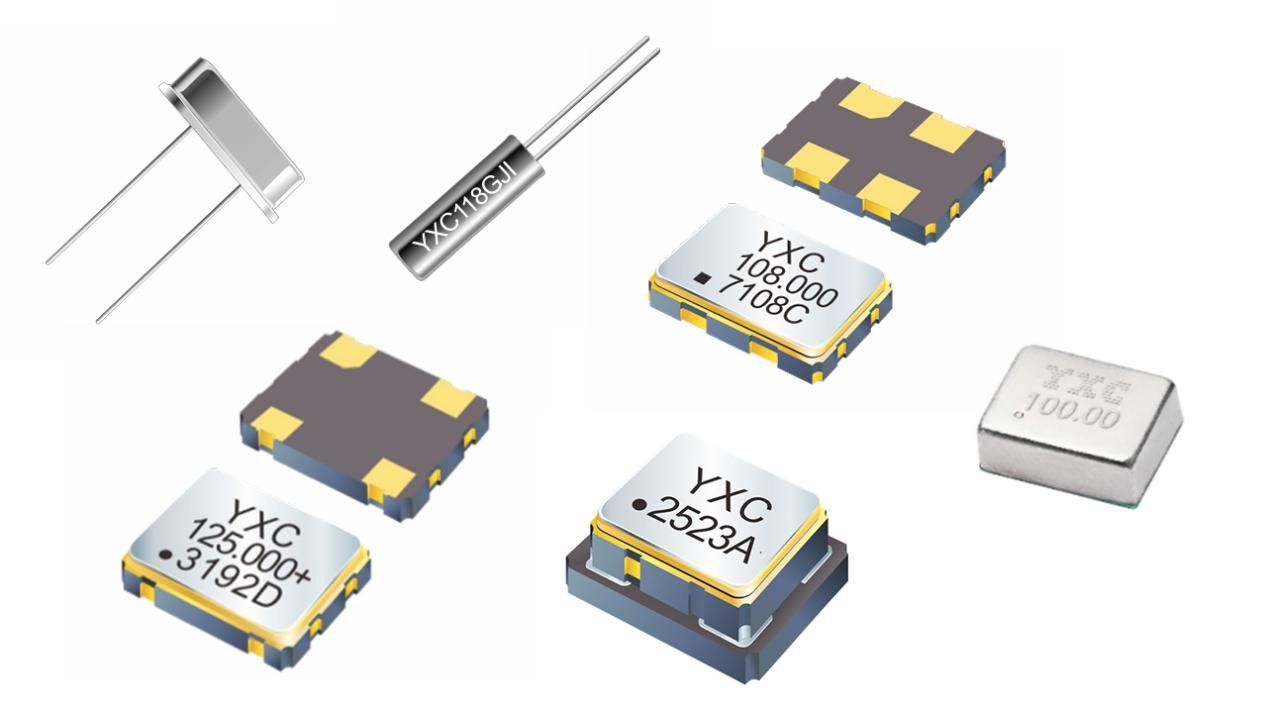
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。
无人机已不再是简单的飞行器,而是集成了尖端感知与决策能力的空中智能载体。其核心系统——特别是自主导航与感知技术——是实现其在测绘、巡检、农业、物流、安防等多个领域高效、精准作业的关键。本文将深入剖析无人机如何通过这些核心技术“看见”、“思考”并“规划”路径,实现真正意义上的自主飞行能力。



