发布时间:2014-06-17 阅读量:2009 来源: 发布人:


下一步,我把7条短线和1条长线焊接到一起了做了 1 条菊花链(如下图)。然后再做 15 条这样的长线,8*8 矩阵的长线就够了。

然后制作夹板(jig),和Hackaday上的方式不同,我没有用硬质板,改用了1/4″的泡沫板。用锥子在上面戳孔了,这比在硬板上用钻头要快点。另外用泡沫板的好处是,孔洞可先弄小点,把LED灯塞进去还更稳定哦。
在一排孔洞上安上 LED 灯,每个 LED 的阳极镀锡后简短,然后拿一条前面做好的菊花链长线,在这排灯上焊接好。在焊接之前,我在菊花链的每个连接处包上了半英寸的热缩管(heat-shrink tubing)。有几次次我忘了热缩管,不得不回头再加。注意:焊接处还烫时,别着急把热缩管套下去。否则热缩管就开始收缩,在 LED 连接处就会套不牢了。

把八行LED灯(阳极)都串联好后,就开始把它们的阴极连起来了。过程一样,记得热缩管。搞定后,从泡沫夹板上取下来。

看看!下面就是完工后的 LED 矩阵!

咦?还差什么呢?这是一个8×8的矩阵,想玩俄罗斯方块,空间还不够哦。所以我又做了一个8×8的矩阵。
Adafruit 的 LED Matrix Backpack 是要求其 LED 矩阵得正确焊接在板子上,但我是焊接了阴极(female header),如此一来,我可以单独给每块 8×8 LED 矩阵加电,也可以给整个 8×16 LED 大矩阵加电。有人可能会和我说,我应该要在这里或哪里加个电阻什么的,否则我会把芯片弄爆,也许他们是对的,但目前来看工作正常的。
为了把我自己做的 LED 矩阵连接到 I2C Backpack,我切掉了部分原型板,然后焊接了阳极。然后把最后一行一列的8″ 线连接到板子上。

这个能正常运行么?我得编写代码来验证了。
二、编程时间
I did all coding with the hardware mounted on my bamboo prototyping board. The mini matrices in the I2C backpack sockets fit on the desk much better than the big, floppy matrices I built would have.
所有代码写入安装在我 Bamboo 原型板上的硬件上。

There are seven Tetrominos—yes, that’s what they’re called—in the game. Each has four points, as implied by the “tetra” prefix. A three-dimensional array stores the location of every pixel of every shape, in each of four possible rotations. Storing each rotation is a lot easier (for my brain at least) than calculating it on the fly. As an example, here’s the T shape:
俄罗斯游戏中共有七种形状(Tetromino),每种形状都只有四个方块(点),这也就是为什么会用上 tetra 前缀的原因。用一个三维数组来存储各种形状每个点的位置,有四种可能的旋转角度。存储每个旋转角度要比在下降时计算其角度更简单(至少我是这样想的)。下面是 T 形状的例子:
1 /* T */ {
2 /* angle 0 */ { {0,1}, {1,1}, {2,1}, {1,2} },
3 /* angle 90 */ { {1,0}, {1,1}, {2,1}, {1,2} },
4 /* angle 180 */ { {1,0}, {0,1}, {1,1}, {2,1} },
5 /* angle 270 */ { {1,0}, {0,1}, {1,1}, {1,2} }
6 }
为了绘制活动块,程序设置有一个 activePiece 变量(形状数组的索引)和一个转动角度变量(形状转动角度描述索引),然后设置每个像素对,每个像素对引出两个偏量:yOffset 和 xOffset,分别指活动块离屏幕底边的距离和离屏幕左边的距离。
It also keeps an array describing the status of each “fixed” piece. With every move of the active piece, whether by gravity or by user control, it checks against that fixed-piece array to see if the requested move can be made without a collision. If the forbidden movement is left, right, or a rotation, it simply doesn’t make the move. If the forbidden movement is vertical it considers the piece to have landed and writes the piece to the array of fixed pieces, then launches a new active piece. Along the way it keeps score, tracks the level, speeds up the drop of the active piece as the game goes on, etc.
还要有一个描述每个“固定块”状态的数组。
三、加工南瓜
这个工程需要一个完美的容器,呃,我说的就是南瓜。南瓜得足够高,得装下8英寸高的 LED 矩阵,还得有个长又直的南瓜柄。我开始买了 3 个南瓜,以为都是完美品,回家才知道一瓜不如一瓜。最后总算有个合适的,其他几个我就用来联系打孔和练刀工了。
进南瓜里面,我在背面开了一个大口。注意:千万别从南瓜柄那下刀,南瓜柄还得留着做游戏控制刊。放 LED 灯,从背面比从上面放更容易。
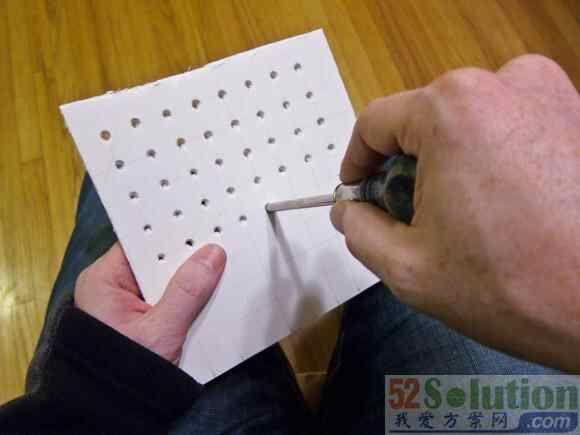
拿一张纸,仿照 8×16 LED 矩阵大小再画一个矩阵,做好标记。

做好标记后,我用 13/64″ 钻头打孔了。

因为圆孔不怎么适合用来做俄罗斯方块游戏,所以我在每个洞眼旁边,用 X-Act 刀戳出了方形。

为了把南瓜柄改造成控制杆,我小心翼翼地从根部锯开了南瓜柄,然后再钻了一个 1/8″ 大小的孔眼,游戏杆得穿过这个孔。

在南瓜内部,瓜柄下方要整平出一个正方形。把锚钉切短了些(过长会穿透南瓜),然后拧紧。稍后再螺丝把控制杆固定在锚钉上。

控制杆的话,我买了SparkFun的短柄操作杆,把红球拧下来,换上南瓜柄。我在南瓜柄上钻了一个孔,给 6mm 的螺栓上胶,然后放进南瓜柄,然后再把南瓜柄拧上操作杆。

然后把 LED 灯塞进南瓜孔洞。中间有个小插曲,从南瓜外边看着是打了16行的孔,从里面看却是15行。因为南瓜不够长,有弧度,导致上上面有两行洞眼打到一行去了。最上一排就只好直接把 LED 灯强行摁进合适的位置去了。

最后把每块电路线接好,电源是8节充电电池。
是时候来玩一把南瓜俄罗斯方块了!!!

除了上面那块 8×8 的矩阵有时候会有些小故障,其他部分运行的都很好。也许是电源供给问题,但应该是一些间断的短路,因为这么多电路连接点都在南瓜肉中。操作杆在上面,而显示屏却在下方,玩起来也觉得怪怪的。如果我重新做一个的话,我会把控制杆放在另外一个独立的南瓜上,或者用无线操作杆,或者把控制杆外接线路打扮成南瓜藤。
我的一些数字:
•128 个LED灯
•256个热缩管
•313个焊接处
•大约每天12小时,用了一周半
•目前最高得分是 9800
下一步做什么?打算移植到西瓜上哦~(这个是逗你玩的)
热门DIY:
喜迎激情世界杯!DIY创意火炬灯
【极客DIY】用单片机AT89C2051自制的八路无线遥控
英伟达否认H100和H200售罄传闻

红外传感器是一种利用红外线进行检测的电子设备,广泛应用于工业自动化,安防监控,智能家居,医疗设备等领域

随着全球制造业迈向集成化与数字化,独立机器人单元正逐渐融入更广泛的自动化系统。DigiKey 本季发布的《机器人技术探秘》的第 5 季《未来工厂》视频系列,联合行业领先企业 Eaton 和 SICK,系统解析了从电气控制、传感技术到数据互联等多个层面的前沿解决方案。新一季邀请了多名专家,一起探讨支撑现代机器人制造与自动化的基础设施与创新技术。

SEMI-e深圳国际半导体展暨2025集成电路产业创新展将于2025年9月10日至12日在深圳国际会展中心(宝安新馆)隆重开幕。本届展会由CIOE中国光博会与集成电路创新联盟联合主办,中新材会展与爱集微共同承办,以“IC设计与应用”、“IC制造与供应链”及“化合物半导体”为核心主题,系统覆盖集成电路全产业链环节。

在AIoT技术加速赋能全球数字化转型、中国持续引领物联网产业创新的大背景下,IOTE 2025第24届国际物联网展·深圳站于8月29日在深圳会展中心(宝安新馆)圆满落幕。本届展会以“生态智能·物联全球”为主题,联合AGIC人工智能展与ISVE智慧商显展,汇聚1001家产业链企业,覆盖8万平方米展区,三日内吸引观众超11万人次,其中海外专业买家达5723人,来自30多个国家和地区,充分彰显了展会的国际影响力与行业凝聚力。



