发布时间:2013-12-15 阅读量:2190 来源: 发布人:
常用的非接触式角度传感器有光电式和磁电式的。光电式的虽然精度比磁电式的高,但对环境要求苛刻、抗震性也较差,因此也就不适用于环境较复杂的工业场所。正是基于这些问题,设计一种基于磁电式的角度传感器,它具有成本低廉,抗干扰性高,分辨力在0.5°以内等优点。
系统总体设计原理
整个系统有四部分组成,分别为电源模块,磁传感器信号采集模块、微处理器模块、信号输出模块,硬件框图如图1所示。

磁传感器信号采集模块主要通过集成有双轴霍尔元件的集成芯片感知角度的变化,并以模拟信号或数字信号方式输出到微处理器中,经过一定的编码和解码,由微处理器输出工业用的电压或电流信号,或者以串口通信方式输出数字信号。为了减小系统的复杂度和误差来源,信号采集单元选择Melexis公司的MLX90316芯片。它属于CMOS霍尔传感器,可以输出与芯片表面平行的磁场相对应的角度位置信息,并以SPI的串行通信方式输出数字信号,省去了A/D转换电路,这极大的减小了系统设计的复杂度。微处理模块选用Freescale公司的MC9S08DZ60,它是一款小体积、低成本、低功耗和较多外部接口的16位微处理器。
它具有24路12位的A/D通道、控制器区域网络(MSCAN)、串行外围设备接口模块(SPI)、串行通信接口(SCI/USART)、内部集成电路总线(IIC)等外设数字接口,很适合与外界进行数字信号通信。
机械结构设计

旋转轴、磁铁和传感器位置的机械偏差将决定系统测量的精确度。相比于理想的Sine和 Cosine 输出曲线,机械误差可以导致附加的电压偏移、相位偏移、幅度变化以及非线性误差等。
磁铁到传感器轴距的下限由饱和效应(电气或磁场)所决定,上限由信噪比、信号与偏移电压的比例来决定。
由于旋转轴在运动过程中产生的机械磨损以及震动产生的轴偏移位置都将导致角度输出信号的非线性,图3揭示了磁铁轴心的非线性度导致的角度误差。

由图3可知磁铁的轴心偏离的越大,最终输出的角度误差越大,因此要保证输出角度的精度,所选取的磁体的轴心的偏离度应满足一定的同心度。
硬件电路设计
硬件电路的核心是磁传感器信号采集模块,它主要是利用磁传感器芯片MLX90316 来实现的,它可以把磁场的变化转化为角度信息。信号采集电路如图4所示。

MLX90316芯片是集成了Tria 度isTM型的CMOS霍尔传感器,当外加磁场的分量与芯片表面平行时则可输出两路正交磁场信息,根据这一特点可以获得对应的角度位置信息,它的内部结构如图5所示。
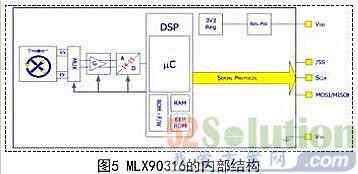
当小型磁铁(径向磁化)在芯片表面上方旋转时,MLX90316芯片内的集磁片(IMC)可以将平行作用于芯片表面的磁场集中起来,并在IMC结构的边缘产生正比于磁场的垂直分量,再通过两对位于 IMC下方的传统平面霍尔元件来检测此信号。这两对霍尔元件的放置方向相互垂直,并都平行于芯片表面(X轴和Y轴方向),通过这样的结构可以将实际角度编码为两个相位差为90°的正弦信号x V 和y V ,并正比于磁场强度。
这两路霍尔信号将通过一个完全差分、带有经典偏移消除技术的模拟处理链进行放大、采样。调节后的模拟信号再通过ADC(可编程为14bits或15bits)转换为数字信号,之后这两个数字信号再通过芯片内部的由DSP实现的反正切函数计算模块来计算角度,计算公式为:
![]()
实际中x V 和y V 还存在式(1)所示的误差表达式:

MLX90316的偏移误差、灵敏度误差和垂直度误差都会对输出的角度信息产生较大的影响。虽然芯片内部使用了动态偏移电压消除机制,并且可以在一定程度上通过芯片内置的DSP 模块来调整它们之间的正交性,但这些误差仍会反应在传感器的输出信号上。通常由芯片本身所产生的误差在0.3度以内。
传感器输出的表征当前角度值的信号可以以串行数字通信(SPI)方式输出,也可再通过D/A转换器变回模拟信号,以PWM模式或模拟量形式输出。为了满足设计电路的结构简单、成本低等要求,这里选择的是SPI输出模式,避免了模拟输入带来的额外误差源。
系统软件设计
由于MLX90316所获得的角度信息是以SPI模式输出的,因此程序设计的关键就是SPI通信的实现。SP总线接口是一种同步串行外设接口它是是一种由4根信号线构成的串行接口协议。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(SS)。SPI接口中,MC9S08DZ60作为主控端,MLX90316作为从属端。SPI通信模块主要让MC9S08DZ606读MLX90316输出的数字信号。
SPI的通信过程为:主控端先输出一个0xAA以及一个0xFF作为通信起始信号,接着输出8个0xFF,而从端会同时输出2个0xFF、4个字节的角度信号以及4个0xFF,从而完成一次数据通信。具体的通信时序如图6所示,软件流程如图(7)所示。


实验验证
基于以上理论分析和实际测量,实测数据如表1所示,角度θ 的误差在0.5度以内,满足所要求的技术指标。

结论
本文在为实现恶劣环境下角度值的测量的基础上,介绍了一款基于MLX90316的非接触式、低成本、高分辨率,高抗干扰的磁性角度传感器的设计方案。方案利用霍尔传感器MLX90316所设计的磁性角度传感器具有非接触式、高精度、高抗干扰等优点。通过对机械结构和硬件电路的分析,找出误差来源,在此基础上编写软件算法,实现角度值的测量, 精度能达到0.5°,满足所要求的技术指标,可广泛运用于汽车、电机等工业领域中。

在AIoT技术加速赋能全球数字化转型、中国持续引领物联网产业创新的大背景下,IOTE 2025第24届国际物联网展·深圳站于8月29日在深圳会展中心(宝安新馆)圆满落幕。本届展会以“生态智能·物联全球”为主题,联合AGIC人工智能展与ISVE智慧商显展,汇聚1001家产业链企业,覆盖8万平方米展区,三日内吸引观众超11万人次,其中海外专业买家达5723人,来自30多个国家和地区,充分彰显了展会的国际影响力与行业凝聚力。

8月27日,IOTE 2025·第24届国际物联网展于深圳国际会展中心(宝安新馆)隆重开幕。本届展会以“生态智能·物联全球”为主题,联合AGIC人工智能展与ISVE智慧商显展,在8万平方米的展区内汇聚超1000家全球展商,涵盖人形机器人、边缘计算、高精度定位、无源物联网、电子纸等前沿领域。开展首日即吸引超5万名专业观众到场,展现出AIoT融合背景下物联网产业的蓬勃活力与无限潜力!

在创新驱动与供给侧改革的持续深化下,2024年中国电子元器件行业迎来强劲复苏与高质量发展,整体销售收入突破2.2万亿元人民币,进出口贸易额稳步增长,展现出显著的发展韧性。行业在移动终端、汽车电子、新能源等关键下游市场的驱动下,不仅产业配套能力实现跃升,一批骨干企业的全球竞争力也持续增强。在此蓬勃发展的产业背景中,第106届中国电子展将于2025年11月5-7日在上海新国际博览中心举行,以“创新强基 智造升级”为主题,搭建全产业链协同创新的重要平台。
寒武纪发布《股票交易风险提示公告》明确指出:当前股价已严重脱离基本面,存在较大投资风险,提醒投资者理性决策,谨慎参与交易。

在现代物流体系中,快递驿站作为“最后一公里”的关键节点,其运营效率直接影响用户体验。面对日益增长的包裹处理压力,传统人工登记模式已难以满足高效、精准的操作要求。而搭载智能扫码技术的PDA手持终端,正成为快递驿站实现数字化管理、提升出入库效率的核心工具。



